We’re pleased to announce Linux Plumbers Conference registration is now open. Please see our attend page for details.
We’re pleased to announce Linux Plumbers Conference registration is now open. Please see our attend page for details.
As is the case for many people working in the security industry, the last few months of my life have been focused on dealing with people wanting to use LLMs everywhere. From an enterprise security perspective that’s not an inherent problem - what’s more of a problem is that people want those agents to have access to resources like their calendar and email and so on, and now we have somewhat non-deterministic agents that seem very enthusiastic to achieve what you asked whether that’s a good idea or not, and we’re combining this with credentials that give them access to sensitive data, and leaving those credentials on disk where they can be committed into git repos or exfiltrated to some other service to make use of them on the agent’s behalf or well just any other number of things, at which point your CEO’s email is suddenly readable by everyone and you’re having a bad day.
As I mentioned in my last post, pretty much every strong mechanism for keeping credentials in place is just not supported in the wider world. We can imagine a universe where agents use hardware (or at least hypervisor) backed certificates to obtain credentials and any that end up leaking are worthless as a result. But, sadly, that’s not an option for most people using existing identity providers. The state of the art is that you use the device code flow and a human authenticates and the token ends up back inside the agent environment and then it proceeds to do whatever it wants with it and you just hope that you wake up the next morning without an awful infoleak occurring.
(An aside: I do not like the device code flow as used in enterprise environments, and I never will. The identity provider doesn’t have a real opportuity to inspect the security posture of the system asking for the token, and as a result some identity providers will restrict tokens that are issued in this way. The common alternative of doing stuff using a more standard flow and having a redirect URI pointing at localhost works fine for local systems and is a pain for remote ones, even if you can commit crimes with SSH forwarding. I’m going to suggest something that I think is better, and you are free to disagree)
I’m not in a position to get every identity provider and service provider to change their security posture, so I’m somewhat stuck in terms of the tokens they’re willing to issue me - largely either JWTs or opaque access tokens, with no support for any mechanism of binding that token to an instance. The token that’s going to have to be provided to the remote service is something I have little influence over. But that doesn’t mean I can’t influence the token that lands inside the agent’s environment. I can issue a placeholder token to the agent, and force it to communicate via a proxy that swaps out the placeholder for the real thing. The worst the agent can do is exfiltrate the placeholder token, and as long as malicious actors don’t have access to that proxy, it doesn’t matter - nobody else can do anything with the placeholder.
This isn’t a terribly novel insight, and it seems like almost everybody has reinvented this on their own. But a lot of these implementations involve you somehow obtaining the real token in advance and then pasting that into something that generates a placeholder that you provide to your agent environment somehow, and it’s all a bit clunky and awkward, and it also means that you need to deal with something that keeps track of the mapping between placeholders and real tokens and oh no we’ve just invented a secret store, and if you want this to work at scale and reliably you’re just invented a high availability distributed secret store, and a lot of people who’ve read that are now shaking their heads and reaching for gin. Can we simplify this, and improve security at the same time? I think we can!
Remember when I said “as long as malicious actors don’t have access to that proxy, it doesn’t matter”? What if they do? What if they compromise one machine inside your environment and are then able to email a bunch of employees and convince their agents to send more tokens back to them and then delete the email before a human reads it? Now you have someone inside the wall with access to those tokens, and presumably with access to the proxy, and now they can be anyone whose agent was gullible enough to think sending them a token was a good idea. This isn’t good!
So, I thought for a while, and I came up with a new idea. We can have a broker service that obtains credentials for us. We can run that centrally, away from the agents. A client in an agentic environment can request a token, and that can result in a URL being generated and the user being directed to open a URL in a browser and authenticate. When the user authenticates, the authentication flow redirects the confirmation back via the broker, and the broker obtains the real auth token. The obvious thing to do now would be to return the auth token to the client in the agentic environment, but we don’t do that. Instead, we mint a new JWT, and add a new claim - one that contains an encrypted copy of the token. In the process we can copy over all the original claims, because those aren’t secret - and now even if the client inspects the token to figure out what access it has, it’ll get a correct answer. We sign the new token with our own signing key, and pass that back to the client. The client now has a legitimate JWT that is utterly useless, because the signature isn’t trusted by anyone other than us.
How does it use it? It makes an API request via a proxy, including the new token in the Authorization: header. The proxy verifies the signature on the token, and then decrypts the original token and swaps out the fake token for the real one. The remote API sees what it expects, and everyone is happy. There’s never a real token in the agentic environment, but also we don’t need to store anyting anywhere. The only state is the encryption keys, and those can be injected into the environment at startup. You need to scale? Just start more of these processes. You need to support multiple availability zones? Just start more of these processes in different places. No persistent data is ever held in the broker or the proxy. You don’t need to care about distributed databases or secret stores.
This felt wonderfully elegant and I felt smug about coming up with a better idea, and then I went to a bar earlier this week and sat down to read RFC 8705 and the guy next to me saw that over my shoulder and asked what I was reading and I explained why I was interested and we talked about agentic identity and then he mentioned that fly.io had something that sounded very similar and I read that and gosh yes it is very similar, so damn you fly.io for stealing my ideas 3 years before I even had them. Anyway. Now I need to do better.
Remember that there’s still a risk around anyone who has access to the proxy having access to the encrypted keys? We can remove that risk as well. It’s not uncommon for agentic environments to have an identity issued via something like SPIFFE, at which point they have a client certificate. You can probably guess where I’m going with this. If we require that an agent present a client cert to the broker when requesting a token, we can embed a representation of that client cert into the token we mint. The proxy can then require mTLS for the client connection, and can verify that the presented certificate matches the one represented in the token. If it does then whoever’s using the token has access to the private key associated with the environment it was issued to. If we then ensure that the private keys backing these certificates are either hardware or hypervisor backed, and as such tied to a specific instance, we now have a high degree of confidence that the token can only be used in its intended environment. Even if our identity provider doesn’t support RFC 8705, we can.
This is fairly straightforward where you’re using a platform where your identity provider is also the environment that’s consuming your tokens, and more annoying for third parties. The broker potentially needs some amount of third party vendor knowledge to make that work for everyone. This is even more the case where login isn’t via your identity provider (thanks, github), but none of this is insurmountable - just annoying. And where vendors issue opaque tokens rather than JWTs, this still isn’t a problem; we can just mint a new JWT that includes the opaque token as an encrypted claim, and include the same certificate binding. The opaque token ends up being the thing that’s presented to the third party, but only after we’ve verified the mTLS binding.
In an ideal world none of this would be necessary - someone would spin up a new agentic environment, a user would prove their identity, and a certificate embodying that identity would be issued to the environment with a private key that can’t be exfiltrated. That certificate would be sufficient to obtain new certificates associated with the same private key, and we could still bind that into mTLS identity. This would be much simpler, but browsers don’t support it, so it’s not likely to happen any time soon.
Anyway. Even if we can’t have the best thing, we can do better than we are at the moment, and also it would be lovely if we could standardise on this rather than have everyone build their own thing. The end.
When you log into a service you’re given an authentication token. Each further request to the site includes that token, allowing the server to figure out who you are and ensuring that you have access to your data. Depending on site policy, this token may either be stored in memory (and so vanish if you restart your browser) or disk. The token is the proof of your identity. As far as the site is concerned, anyone with your token is you. These tokens may be traditional browser cookies, but they may also be stored in either site local storage or (if you’re not using a browser) in some other storage location.
In recent years we’ve seen infostealer malware (like LummaC2) gain the ability to exfiltrate user tokens, allowing attackers to gain access to the user’s data without needing to retain access to the user’s machine. This attack is viable even if the site has strong MFA requirements, so passkeys don’t help. Encrypting the tokens on disk doesn’t prevent the malware from scraping them out of the browser’s RAM or obtaining whatever key is used to encrypt them. This feels like a pretty hard problem to solve.
But that hasn’t stopped people from trying! Dirk Balfanz wrote an IETF draft describing a mechanism for using self-signed certificates for TLS authentication. This uses the mutual authentication feature of the TLS protocol that requires both sides prove their identity to each other. In regular TLS, the remote site presents a signed certificate that tells you who it is. When performing mutual authentication, you then present a certificate to the remote site telling it who you are. These client certificates are largely unused outside enterprise environments because they’re a huge pain to deploy. It’s not so much that this has sharp edges, it’s that it’s entirely made of sharp edges. Managing certificate deployment to your devices is hard. Browsers get confused if the certificates change under them. You have one certificate and it lives forever, so sites you present it to can track your identity. Users are prompted to choose a certificate to authenticate with, and if they pick the wrong one everything breaks and is hard to recover. I’ve deployed this and I did not have a good time.
But Balfanz’s idea was simple. Rather than require certificates to be deployed, browsers would simply generate a certificate on the fly. The goal wasn’t to prove the device or user’s identity in any global way - but it would associate a TLS session with a specific certificate. You could then, for example, include a hash of the certificate in the cookie, and if someone tried to use that cookie without presenting that certificate then the cookie could be rejected. If the browser used a hardware-backed private key for the certificate then it would be impossible for an attacker to steal it. Sure, you could still steal cookies, but you wouldn’t be able to use them.
This was written almost 15 years ago, and seems simple, elegant, and functional. It didn’t happen. Part of the reason for that is that, well, it wasn’t quite so simple. One problem was privacy related. Cookies are only sent after the TLS session is established, so anyone monitoring the network doesn’t know anything about the user identity. A naive implementation of this approach would have meant the client certificate being sent before session establishment, and now user identity can be tracked (no longer an issue if this was implemented on top of TLS 1.3, but this was a log time ago). This was avoided by reordering the client handshake, but that meant having to modify the TLS specification and implementations would have to be updated to support this. Another was that figuring out the granularity of the certificates was difficult. You’d want to use different certificates for every site to avoid them effectively becoming tracking cookies, but you need to provide the certificate before cookies are set, and you don’t know what origin the site is going to set in its cookies. If you generate a certificate for a.example.com and a different one for b.example.com, and a.example.com sets a cookie for *.example.com and includes the certificate you used for a.example.com, that cookie isn’t going to work on b.example.com and things are broken. This meant supporting it wasn’t as straightforward as it seemed - you’d need to ensure that your cookie scope was compatible with the certificate scope. You could probably make this work well enough by aligning it with the Public Suffix List, but there was still some risk of expectations not being aligned.
And, perhaps most importantly, TLS session resumption (replaced by pre-shared keys in TLS 1.3) somewhat defeats the purpose of the exercise - clients store state that allows them to re-establish a TLS connection without performing certificate exchange (this reduces overhead if a connection gets interrupted or you switch to a new network or anything along those lines), and anyone in a position to steal cookies could steal that state as well.
The followup attempt was channel IDs. This simplified the implementation somewhat - rather than certificates, a raw public key would be sent, along with proof of possession of the private key in the form of a signature over a portion of the TLS handshake. This was required even in the event of session resumption, which avoided having to worry about theft of session secrets. The timing of the exchange was after the encrypted session had been established, so user identity couldn’t be leaked that way either. Cookies could then be bound to this identifier. Unfortunately it didn’t really deal with the problem of scoping keys in a way that would match cookie requirements, and the spec suggests that the right way of handling this is to scope keys to TLDs, which would enable user tracking across sites (Chrome’s implementation apparently restricted it to eTLD+1, which would match the third party cookie policy and avoid the tracking risk).
Chrome added support for this, but it was removed in early 2018. The discussion of some of the pain points in that message is interesting, explicitly calling out problems with connection coalescing across domains and the incompatibility with zero-RTT TLS1.3. The overall consensus at the time seems to be that trying to solve this entirely at the TLS layer has too many rough edges, and a different approach should be taken.
And so almost 7 years after the initial draft for origin bound certificates, we come to token binding. This ended up being a rather more complex endeavour, covering 3 different RFCs describing how it impacts TLS, how to incorporate it into HTTP, and how to manage all the various parties involved in the process. The short version is that it’s pretty similar to channel ID, except that there’s also a documented mechanism for allowing tokens to be bound to one party and consumed by another, avoiding any need for widely scoped keys. Token binding effectively solved all the issues in the original proposal, but at the cost of somewhat more complexity.
The RFC was finalised in October 2018. Chrome removed its (incomplete, draft) support for token binding in November 2018. Edge carried support until late 2024. Despite getting all the way through the RFC process, it’s functionally dead.
The process up until this point had been largely initiated by Google, with Microsoft contributing significantly to the token binding standards. The work had been focused on identifying a generic solution to the problem rather than tying it to any specific authentication flow. The next step was in a different direction - rather than trying to fix this for the entire internet, how about we try to fix it for OAuth?
RFC 8705 is titled “OAuth 2.0 Mutual-TLS Client Authentication and Certificate-Bound Access Tokens”. This is basically the 2011 approach, but (a) with an explicit definition of how the certificate should be incorporated into issued auth cookies, and (b) with a proviso that well uh if you’re going to use tokens issued by your IdP to authenticate to someone else then well you’re going to need to use the same cert for both. This is probably fine for the company-owned-laptop case where you’re actually fine with multiple sites being able to tie identities together (that’s kind of the point here!), and also works for “I am using an app and not a browser”, but doesn’t work for more generic scenarios. It also doesn’t seem to take the session resumption case into account at all? Support for RFC8705 seems poor, as far as I can tell of the big players only Auth0 implements it. In theory it works fine with self-signed client certs but in reality that’s going to be almost as difficult to support across multiple platforms as just issuing proper client certs in the first place, so deployment is going to be kind of a pain. But the good news is it doesn’t rely on any TLS extensions or custom browser behaviour, so at the client side it works fine with any browser.
Which brings us on to RFC 9449, “Demonstrating Proof of Possession”. This goes even further than RFC8705 in terms of reducing the burden of deployment - it works fine with existing browsers, and it doesn’t even require any certs. The client generates a keypair and provides the pubkey when requesting the cookie. The cookie contains the pubkey. Every request to the service now provides the cookie with the pubkey and also provides a signature over the URI and HTTP method. If the signature matches the pubkey in the token then clearly the signature came from the machine the token was issued to, and everything is good.
This does come with some downsides, though. The first is that it uses browser interfaces to generate the keys (typically crypto.subtle.generatekey()) and as far as I can tell there are no browsers that guarantee that that key is going to be generated in hardware even if it’s marked non-exportable, so anyone able to steal the cookies can also steal the keys. The second is that the signature only covers the URI and HTTP method, and not the message content or any other headers, so anyone able to exfiltrate a valid signature can replay it against the same URI with different message content. The recommended way to handle this is to reject any signatures that weren’t generated within the last few seconds, which is a wonderful additional way to allow clock skew to give you a Bad Day. And the third is that every single request has to be separately signed, which is not intrinsically a problem because computers are fast and have multiple cores, but if you’re trying to solve the first problem by sticking the key in a TPM then you’re dealing with something that’s slow and single threaded and that’s maybe acceptable if you’re using client certificates (because there’s going to be one signature per session and you can use the same session for multiple requests) but probably not if you’re dealing with a user opening a browser that restores previous tabs and each of those is a webapp that fires off 100 requests in parallel.
In case it wasn’t clear, I don’t like DPoP. It doesn’t feel like it actually solves the underlying problem that we see in the real world (malware running in a context where if it can grab the tokens it can grab the keys), it adds a massive amount of overhead, and it has baked in replay vulnerabilities. I don’t know why it exists and I’m incredibly suspicious of vendors telling me that it fixes my problems, because if they’re telling me that then I’m going to end up assuming that they either don’t understand my problems or they don’t understand their technology, and neither of those is good.
Still. Then we get to the thing that prompted me to write this - Chrome’s announcement that they had launched device-bound session credentials. This is interesting because it’s a Chrome feature that’s explicitly intended to counter on-device malware, which was one of the things that was out of scope in 2018 when token binding was being removed. Since this is entire web level it doesn’t have to be an RFC, and so is instead defined by W3C. I’m going to handwave all the complexity and say that it’s basically a way to register a public key when a cookie is issued, and then prove possession of the private key when it’s time to renew the cookie. By making the cookies shortlived and having support for rotating them in the background, user impact is basically zero and while it’s still possible for an attacker to exfiltrate and use a cookie they’ll only be able to do so for a short window before it needs to be refreshed - something the attacker can’t do, since they don’t have the private key. This avoids the DPoP overhead because you only need to do signing once per cookie per cookie lifetime, and not on every single request. I don’t like this due to the window where exfiltrated tokens can be used, but it feels like a strict improvement over the status quo. An extension called device-bound session credentials for enterprise allows pre-enrollment of device keys, so even though the actual runtime DBCE flow doesn’t involve certificates, certificates can be used for device registration in enterprise environments and you can make sure that auth cookies only go to trusted devices. Unfortunately this is Chrome-only, and so we’re going to need to wait for it to be backported to all the random app frameworks for it to have widespread support on mobile or for almost everyone’s desktop app that’s actually three websites in an Electron wrapper. Mozilla’s current position is that they’re not in favour of it, so I guess we’ll see where Safari lands in terms of broad uptake.
The last thing on my list is another client cert/OAuth binding, this one still in draft state at the time of writing. This one is aimed primarily at the use of agent-driven tooling, where you have something running in the background using a whole bunch of tools that are each acting on your behalf. Authenticating to all of them separately isn’t a fun time, but giving broadly scoped access tokens to a non-deterministic agent and trusting that it’ll never post them somewhere public also isn’t a fun time. The key distinction between it and RFC8705 is that it’s aimed at connections rather than sessions, which avoids the worries about session resumption. This is done with TLS Exporters, which in TLS 1.3 should be unique to the connection even over session resumption (TLS 1.2 may reuse some of the same key material for exporters over session resumption, so it’s recommended to enforce 1.3 for this). By providing a new signature alongside the cookie on every new connection, the client proves that it still has access to the private key. This is a very new spec and I haven’t had much time to work through it yet, but my naive understanding is that unlike RFC8705 this would require some additional client support to be able to regenerate the client signature on every TLS reconnection.
This doesn’t avoid all the problems that RFC8705 has, including how to scope certificates. For the agentic use case that probably doesn’t matter - all these tools are acting on behalf of the same user, it’s fine if all the sites involved know they’re the same user. But it doesn’t solve the general purpose user use case, and right now DBSC seems like the best we have there.
But. Part of me still wonders whether Dirk Balfanz’s approach was the right one. Yes, there’s risk associated with TLS session resumption, but in the worst case you could just switch that off for high risk setups. The cookie scope argument is real, and also in cases where it could violate privacy the site owner could already choose to broaden their cookie scope and violate your privacy, and in cases where it breaks things you could just not make use of it. The other problems are largely fixed by TLS 1.3, and then we’re just left with “Browsers handle client certificates badly” to which my answer is “Yes, and we should fix that anyway”.
Despite having a pretty good answer to this solution over a decade ago, the closest we have to actual deployment is something that offers strictly worse security guarantees. And tokens keep getting stolen, and compromises keep occurring, and for the most part people shrug and get on with things.
Software Engineering Radio is a podcast for people in IT/development with over 700 episodes across many topics over 20 years. They haven't touched on the Linux kernel much. I was invited on as part of my role at Red Hat as a Distinguished Engineer, but the podcast is really an insight into kernel maintenance, in graphics and beyond, touching on the scope and scale of the project.
It was my first time to record something that wasn't just me talking at a conference/meetup, and it was all very professional, with sound checks and brainstorming before hand.
The content is at a pretty broad and introductory level. We talked about kernel development processes, maintenance processes, and we touch on rust in the kernel a bit. It's mostly about the sheer size and scale of the project and how Linus releases things, how trees get to Linus and how the GPU work is done.
Hopefully you enjoy listening to it!
[1] https://se-radio.net/2026/06/se-radio-723-dave-airlie-on-linux-kernel-maintenance/
Hello Linux Plumbers community!
All Microconferences have now been accepted. Please go ahead and take a look at them and if you find something you would like to discuss, please submit a contribution. To do so, go to the Call for Proposals page, select the Submit new abstract button, add your discussion topic and submit. Make sure to select the proper Microconference in the Track field.
It is also a good idea to read the blog about The Ideal Microconference Topic Submission to understand what is expected of a microconference topic.
As most of you are painfully aware, Linux Plumbers Conference registrations can run out very fast (yes, we got lots of complaints last year). This year, we’re taking a couple of steps to alleviate the issue. Firstly, we’re expanding the venue size in Prague to match the number of attendees we got in Vienna (800) which will hopefully mean we have more than enough places to keep registration open all the way up to the beginning of the conference. Secondly, we’re going to have an pre-registration period starting two weeks before general registration opens for anyone who submits content. The way this will work is that if you submit anything via indico before general registration opens, you’ll receive a voucher and instructions to participate (this applies to every track and MC submission regardless of the accept/reject or pending state). The cost will be the same as general registration (US$600) but you’ll be under no obligation to take up the voucher, which will expire when general registration opens. We’re aligning the acceptance/rejection notices of the tracks we directly control (Refereed and Kernel Summit) to be complete around the time we open pre-registration. However, for other tracks and MC submissions that aren’t aligned, if you take up an early registration voucher but are subsequently offered a free pass, we’ll refund it (although if your company pays, we’d appreciate not having to since cvent charges us).
As a reminder of free pass distribution: every accepted Track Speaker (Refereed, Kernel Summit, Net, BPF and Toolchain) gets a free pass. However, Microconferences operate differently and accepted Microconference discussion leads may not receive a free pass (Microconferences have two free passes each and can distribute them arbitrarily to encourage key attendees).
The anticipated date for the opening of pre-registration is Friday 10 July 2026 (with the first day of general registration being 24 July), but remember this may change due to logistical problems with the cvent website (which we don’t control).
I'm doing a podcast recording this week, so I wanted to run some numbers so I could have some facts rather than feels. It turns out my feels were off by a factor of 3 or so.
If asked, I've always said the contributor count to the drm subsystem is probably in the 100 or so developers per release cycle.
Did the simplest:
git log --format='%aN' v6.14..v6.15 drivers/gpu/drm/ include/uapi/drm/ include/drm/ | sort -u | wc -l
Iterated over a few kernel releases
v6.15 326
v6.16 322
v6.17 300
v6.18 334
v6.19 332
v7.0-rc6 346
The number for the complete kernel in those scenarios are ~2000 usually, which means drm subsystem has around 15-16% of the kernel contributors.
I'm a bit spun out, that's quite a lot of people. I think I'll blame Sima for it. This also explains why I'm a bit out of touch with the process problems other maintainers have, and when I say stuff like a lot of workflows don't scale, this is what I mean.
Because I am bad at giving up on things, I’ve been running my own email server for over 20 years. Some of that time it’s been a PC at the end of a DSL line, some of that time it’s been a Mac Mini in a data centre, and some of that time it’s been a hosted VM. Last year I decided to bring it in house, and since then I’ve been gradually consolidating as much of the rest of my online presence as possible on it. I mentioned this on Mastodon and a couple of people asked for more details, so here we are.
First: my ISP doesn’t guarantee a static IPv4 unless I’m on a business plan and that seems like it’d cost a bunch more, so I’m doing what I described here: running a Wireguard link between a box that sits in a cupboard in my living room and the smallest OVH instance I can, with an additional IP address allocated to the VM and NATted over the VPN link. The practical outcome of this is that my home IP address is irrelevant and can change as much as it wants - my DNS points at the OVH IP, and traffic to that all ends up hitting my server.
The server itself is pretty uninteresting. It’s a refurbished HP EliteDesk which idles at 10W or so, along 2TB of NVMe and 32GB of RAM that I found under a pile of laptops in my office. We’re not talking rackmount Xeon levels of performance, but it’s entirely adequate for everything I’m doing here.
So. Let’s talk about the services I’m hosting.
This one’s trivial. I’m not really hosting much of a website right now, but what there is is served via Apache with a Let’s Encrypt certificate. Nothing interesting at all here, other than the proxying that’s going to be relevant later.
Inbound email is easy enough. I’m running Postfix with a pretty stock configuration, and my MX records point at me. The same Let’s Encrypt certificate is there for TLS delivery. I’m using Dovecot as an IMAP server (again with the same cert). You can find plenty of guides on setting this up.
Outbound email? That’s harder. I’m on a residential IP address, so if I send email directly nobody’s going to deliver it. Going via my OVH address isn’t going to be a lot better. I have a Google Workspace, so in the end I just made use of Google’s SMTP relay service. There’s various commerical alternatives available, I just chose this one because it didn’t cost me anything more than I’m already paying.
My blog is largely static content generated by Hugo. Comments are Remark42 running in a Docker container. If you don’t want to handle even that level of dynamic content you can use a third party comment provider like Disqus.
I’m deploying Mastodon pretty much along the lines of the upstream compose file. Apache is proxying /api/v1/streaming to the websocket provided by the streaming container and / to the actual Mastodon service. The only thing I tripped over for a while was the need to set the “X-Forwarded-Proto” header since otherwise you get stuck in a redirect loop of Mastodon receiving a request over http (because TLS termination is being done by the Apache proxy) and redirecting to https, except that’s where we just came from.
Mastodon is easily the heaviest part of all of this, using around 5GB of RAM and 60GB of disk for an instance with 3 users. This is more a point of principle than an especially good idea.
I’m arguably cheating here. Bluesky’s federation model is quite different to Mastodon - while running a Mastodon service implies running the webview and other infrastructure associated with it, Bluesky has split that into multiple parts. User data is stored on Personal Data Servers, then aggregated from those by Relays, and then displayed on Appviews. Third parties can run any of these, but a user’s actual posts are stored on a PDS. There are various reasons to run the others, for instance to implement alternative moderation policies, but if all you want is to ensure that you have control over your data, running a PDS is sufficient. I followed these instructions, other than using Apache as the frontend proxy rather than nginx, and it’s all been working fine since then. In terms of ensuring that my data remains under my control, it’s sufficient.
I’m using borgmatic, backing up to a local Synology NAS and also to my parents’ home (where I have another HP EliteDesk set up with an equivalent OVH IPv4 fronting setup). At some point I’ll check that I’m actually able to restore them.
Most of what I post is now stored on a system that’s happily living under a TV, but is available to the rest of the world just as visibly as if I used a hosted provider. Is this necessary? No. Does it improve my life? In no practical way. Does it generate additional complexity? Absolutely. Should you do it? Oh good heavens no. But you can, and once it’s working it largely just keeps working, and there’s a certain sense of comfort in knowing that my online presence is carefully contained in a small box making a gentle whirring noise.
Submissions for the Refereed Track, Kernel Summit, BoF and Microconferences are now open. Linux Plumbers will be held this year in Prague, Czechia from October 5-7th.
The Refereed presentations are 45 minutes in length (Talk+Q&A) and should focus on a specific aspect of the “plumbing” in a Linux ecosystem. Examples of Linux plumbing include core kernel subsystems, init systems, core libraries, toolchains, windowing systems, management tools, device support, media creation/playback, testing, and so on. The best presentations are not about finished work, but rather problem statements, proposals, or proof-of-concept solutions that require face-to-face discussions and debate.
The Kernel Summit track is divided into sessions of 45 minutes. Sessions may be focused on the discussion of specific Linux kernel topics which can be better resolved in person than over e-mail. The program committee will also consider “information sharing” topics if they are clearly of interest to the wider development community (i.e., advanced training in topics that would be useful to kernel developers). In addition to submitting proposals to the Linux Plumber website, please also send a copy of the proposal as an e-mail to the ksummit@lists.linux.dev mailing list with a subject prefix of [TECH TOPIC].
The Microconferences are 3 and a half hours of technical discussion, broken up into 15 to 30 minute subtopics. The only presentations allowed are those that are needed to bring the audience up to speed and should not last more than half the allotted time for the subtopic. To submit a Microconference, provide a topic, some examples of subtopics to be discussed and a list of key people that should be present to have meaningful discussions. For Microconferences that have been to Linux Plumbers in the past, they should provide a list of accomplishments that were a direct result of the discussions from their previous sessions (with links to patches and such).
Presenters and Microconference subtopic leads should be physically present at the conference. Remote presentations will be allowed strictly on an emergency basis.
The Microconference Track submissions end at 11:59PM UTC on Thursday, April 23, 2026, submissions for subtopics within a Microconference will open shortly after the Microconference has been fully accepted.
The Refereed Track and Kernel Summit submissions end at 11:59PM UTC on Sunday, June 28, 2026.
Please submit your Refereed Track, Kernel Summit, BoF or Microconference topic. We are looking forward to seeing the great content that is submitted that makes Linux Plumbers the best technical conference there is.
When you’re looking at source code it can be helpful to have some evidence indicating who wrote it. Author tags give a surface level indication, but it turns out you can just lie and if someone isn’t paying attention when merging stuff there’s certainly a risk that a commit could be merged with an author field that doesn’t represent reality. Account compromise can make this even worse - a PR being opened by a compromised user is going to be hard to distinguish from the authentic user. In a world where supply chain security is an increasing concern, it’s easy to understand why people would want more evidence that code was actually written by the person it’s attributed to.
git has support for cryptographically signing commits and tags. Because git is about choice even if Linux isn’t, you can do this signing with OpenPGP keys, X.509 certificates, or SSH keys. You’re probably going to be unsurprised about my feelings around OpenPGP and the web of trust, and X.509 certificates are an absolute nightmare. That leaves SSH keys, but bare cryptographic keys aren’t terribly helpful in isolation - you need some way to make a determination about which keys you trust. If you’re using someting like GitHub you can extract that information from the set of keys associated with a user account1, but that means that a compromised GitHub account is now also a way to alter the set of trusted keys and also when was the last time you audited your keys and how certain are you that every trusted key there is still 100% under your control? Surely there’s a better way.
And, thankfully, there is. OpenSSH supports certificates, an SSH public key that’s been signed by some trusted party and so now you can assert that it’s trustworthy in some form. SSH Certificates also contain metadata in the form of Principals, a list of identities that the trusted party included in the certificate. These might simply be usernames, but they might also provide information about group membership. There’s also, unsurprisingly, native support in SSH for forwarding them (using the agent forwarding protocol), so you can keep your keys on your local system, ssh into your actual dev system, and have access to them without any additional complexity.
And, wonderfully, you can use them in git! Let’s find out how.
There’s two main parameters you need to set. First,
|
|
because unfortunately for historical reasons all the git signing config is
under the gpg namespace even if you’re not using OpenPGP. Yes, this makes
me sad. But you’re also going to need something else. Either
user.signingkey needs to be set to the path of your certificate, or you
need to set gpg.ssh.defaultKeyCommand to a command that will talk to an
SSH agent and find the certificate for you (this can be helpful if it’s
stored on a smartcard or something rather than on disk). Thankfully for you,
I’ve written one. It will
talk to an SSH agent (either whatever’s pointed at by the SSH_AUTH_SOCK
environment variable or with the -agent argument), find a certificate
signed with the key provided with the -ca argument, and then pass that
back to git. Now you can simply pass -S to git commit and various other
commands, and you’ll have a signature.
This is a bit more annoying. Using native git tooling ends up calling out to
ssh-keygen2, which validates signatures against a file in a format
that looks somewhat like authorized-keys. This lets you add something like:
|
|
which will match all principals (the wildcard) and succeed if the signature is made with a certificate that’s signed by the key following cert-authority. I recommend you don’t read the code that does this in git because I made that mistake myself, but it does work. Unfortunately it doesn’t provide a lot of granularity around things like “Does the certificate need to be valid at this specific time” and “Should the user only be able to modify specific files” and that kind of thing, but also if you’re using GitHub or GitLab you wouldn’t need to do this at all because they’ll just do this magically and put a “verified” tag against anything with a valid signature, right?
Haha. No.
Unfortunately while both GitHub and GitLab support using SSH certificates
for authentication (so a user can’t push to a repo unless they have a
certificate signed by the configured CA), there’s currently no way to say
“Trust all commits with an SSH certificate signed by this CA”. I am unclear
on why. So, I wrote my
own. It takes a range of
commits, and verifies that each one is signed with either a certificate
signed by the key in CA_PUB_KEY or (optionally) an OpenPGP key provided in
ALLOWED_PGP_KEYS. Why OpenPGP? Because even if you sign all of your own
commits with an SSH certificate, anyone using the API or web interface will
end up with their commits signed by an OpenPGP key, and if you want to have
those commits validate you’ll need to handle that.
In any case, this should be easy enough to integrate into whatever CI pipeline you have. This is currently very much a proof of concept and I wouldn’t recommend deploying it anywhere, but I am interested in merging support for additional policy around things like expiry dates or group membership.
Of course, certificates don’t buy you any additional security if an attacker is able to steal your private key material - they can steal the certificate at the same time. This can be avoided on almost all modern hardware by storing the private key in a separate cryptographic coprocessor - a Trusted Platform Module on PCs, or the Secure Enclave on Macs. If you’re on a Mac then Secretive has been around for some time, but things are a little harder on Windows and Linux - there’s various things you can do with PKCS#11 but you’ll hate yourself even more than you’ll hate me for suggesting it in the first place, and there’s ssh-tpm-agent except it’s Linux only and quite tied to Linux.
So, obviously, I wrote my own. This makes use of the go-attestation library my team at Google wrote, and is able to generate TPM-backed keys and export them over the SSH agent protocol. It’s also able to proxy requests back to an existing agent, so you can just have it take care of your TPM-backed keys and continue using your existing agent for everything else. In theory it should also work on Windows3 but this is all in preparation for a talk I only found out I was giving about two weeks beforehand, so I haven’t actually had time to test anything other than that it builds.
And, delightfully, because the agent protocol doesn’t care about where the keys are actually stored, this still works just fine with forwarding - you can ssh into a remote system and sign something using a private key that’s stored in your local TPM or Secure Enclave. Remote use can be as transparent as local use.
Ah yes you may be wondering why I’m using go-attestation and why the term “attestation” is in my agent’s name. It’s because when I’m generating the key I’m also generating all the artifacts required to prove that the key was generated on a particular TPM. I haven’t actually implemented the other end of that yet, but if implemented this would allow you to verify that a key was generated in hardware before you issue it with an SSH certificate - and in an age of agentic bots accidentally exfiltrating whatever they find on disk, that gives you a lot more confidence that a commit was signed on hardware you own.
Using SSH certificates for git commit signing is great - the tooling is a bit rough but otherwise they’re basically better than every other alternative, and also if you already have infrastructure for issuing SSH certificates then you can just reuse it4 and everyone wins.
Did you know you can just download people’s SSH pubkeys from github from https://github.com/<username>.keys? Now you do ↩︎
Yes it is somewhat confusing that the keygen command does things
other than generate keys ↩︎
This is more difficult than it sounds ↩︎
And if you don’t, by implementing this you now have infrastructure for issuing SSH certificates and can use that for SSH authentication as well. ↩︎
A lot of hardware runs non-free software. Sometimes that non-free software is in ROM. Sometimes it’s in flash. Sometimes it’s not stored on the device at all, it’s pushed into it at runtime by another piece of hardware or by the operating system. We typically refer to this software as “firmware” to differentiate it from the software run on the CPU after the OS has started1, but a lot of it (and, these days, probably most of it) is software written in C or some other systems programming language and targeting Arm or RISC-V or maybe MIPS and even sometimes x862. There’s no real distinction between it and any other bit of software you run, except it’s generally not run within the context of the OS3. Anyway. It’s code. I’m going to simplify things here and stop using the words “software” or “firmware” and just say “code” instead, because that way we don’t need to worry about semantics.
A fundamental problem for free software enthusiasts is that almost all of the code we’re talking about here is non-free. In some cases, it’s cryptographically signed in a way that makes it difficult or impossible to replace it with free code. In some cases it’s even encrypted, such that even examining the code is impossible. But because it’s code, sometimes the vendor responsible for it will provide updates, and now you get to choose whether or not to apply those updates.
I’m now going to present some things to consider. These are not in any particular order and are not intended to form any sort of argument in themselves, but are representative of the opinions you will get from various people and I would like you to read these, think about them, and come to your own set of opinions before I tell you what my opinion is.
THINGS TO CONSIDER
Does this blob do what it claims to do? Does it suddenly introduce functionality you don’t want? Does it introduce security flaws? Does it introduce deliberate backdoors? Does it make your life better or worse?
You’re almost certainly being provided with a blob of compiled code, with no source code available. You can’t just diff the source files, satisfy yourself that they’re fine, and then install them. To be fair, even though you (as someone reading this) are probably more capable of doing that than the average human, you’re likely not doing that even if you are capable because you’re also likely installing kernel upgrades that contain vast quantities of code beyond your ability to understand4. We don’t rely on our personal ability, we rely on the ability of those around us to do that validation, and we rely on an existing (possibly transitive) trust relationship with those involved. You don’t know the people who created this blob, you likely don’t know people who do know the people who created this blob, these people probably don’t have an online presence that gives you more insight. Why should you trust them?
If it’s in ROM and it turns out to be hostile then nobody can fix it ever
The people creating these blobs largely work for the same company that built the hardware in the first place. When they built that hardware they could have backdoored it in any number of ways. And if the hardware has a built-in copy of the code it runs, why do you trust that that copy isn’t backdoored? Maybe it isn’t and updates would introduce a backdoor, but in that case if you buy new hardware that runs new code aren’t you putting yourself at the same risk?
Designing hardware where you’re able to provide updated code and nobody else can is just a dick move5. We shouldn’t encourage vendors who do that.
Humans are bad at writing code, and code running on ancilliary hardware is no exception. It contains bugs. These bugs are sometimes very bad. This paper describes a set of vulnerabilities identified in code running on SSDs that made it possible to bypass encryption secrets. The SSD vendors released updates that fixed these issues. If the code couldn’t be replaced then anyone relying on those security features would need to replace the hardware.
Even if blobs are signed and can’t easily be replaced, the ones that aren’t encrypted can still be examined. The SSD vulnerabilities above were identifiable because researchers were able to reverse engineer the updates. It can be more annoying to audit binary code than source code, but it’s still possible.
Vulnerabilities in code running on other hardware can still compromise the OS. If someone can compromise the code running on your wifi card then if you don’t have a strong IOMMU setup they’re going to be able to overwrite your running OS.
Replacing one non-free blob with another non-free blob increases the total number of non-free blobs involved in the whole system, but doesn’t increase the number that are actually executing at any point in time.
Ok we’re done with the things to consider. Please spend a few seconds thinking about what the tradeoffs are here and what your feelings are. Proceed when ready.
I trust my CPU vendor. I don’t trust my CPU vendor because I want to, I trust my CPU vendor because I have no choice. I don’t think it’s likely that my CPU vendor has designed a CPU that identifies when I’m generating cryptographic keys and biases the RNG output so my keys are significantly weaker than they look, but it’s not literally impossible. I generate keys on it anyway, because what choice do I have? At some point I will buy a new laptop because Electron will no longer fit in 32GB of RAM and I will have to make the same affirmation of trust, because the alternative is that I just don’t have a computer. And in any case, I will be communicating with other people who generated their keys on CPUs I have no control over, and I will also be relying on them to be trustworthy. If I refuse to trust my CPU then I don’t get to computer, and if I don’t get to computer then I will be sad. I suspect I’m not alone here.
Why would I install a code update on my CPU when my CPU’s job is to run my code in the first place? Because it turns out that CPUs are complicated and messy and they have their own bugs, and those bugs may be functional (for example, some performance counter functionality was broken on Sandybridge at release, and was then fixed with a microcode blob update) and if you update it your hardware works better. Or it might be that you’re running a CPU with speculative execution bugs and there’s a microcode update that provides a mitigation for that even if your CPU is slower when you enable it, but at least now you can run virtual machines without code in those virtual machines being able to reach outside the hypervisor boundary and extract secrets from other contexts. When it’s put that way, why would I not install the update?
And the straightforward answer is that theoretically it could include new code that doesn’t act in my interests, either deliberately or not. And, yes, this is theoretically possible. Of course, if you don’t trust your CPU vendor, why are you buying CPUs from them, but well maybe they’ve been corrupted (in which case don’t buy any new CPUs from them either) or maybe they’ve just introduced a new vulnerability by accident, and also you’re in a position to determine whether the alleged security improvements matter to you at all. Do you care about speculative execution attacks if all software running on your system is trustworthy? Probably not! Do you need to update a blob that fixes something you don’t care about and which might introduce some sort of vulnerability? Seems like no!
But there’s a difference between a recommendation for a fully informed device owner who has a full understanding of threats, and a recommendation for an average user who just wants their computer to work and to not be ransomwared. A code update on a wifi card may introduce a backdoor, or it may fix the ability for someone to compromise your machine with a hostile access point. Most people are just not going to be in a position to figure out which is more likely, and there’s no single answer that’s correct for everyone. What we do know is that where vulnerabilities in this sort of code have been discovered, updates have tended to fix them - but nobody has flagged such an update as a real-world vector for system compromise.
My personal opinion? You should make your own mind up, but also you shouldn’t impose that choice on others, because your threat model is not necessarily their threat model. Code updates are a reasonable default, but they shouldn’t be unilaterally imposed, and nor should they be blocked outright. And the best way to shift the balance of power away from vendors who insist on distributing non-free blobs is to demonstrate the benefits gained from them being free - a vendor who ships free code on their system enables their customers to improve their code and enable new functionality and make their hardware more attractive.
It’s impossible to say with absolute certainty that your security will be improved by installing code blobs. It’s also impossible to say with absolute certainty that it won’t. So far evidence tends to support the idea that most updates that claim to fix security issues do, and there’s not a lot of evidence to support the idea that updates add new backdoors. Overall I’d say that providing the updates is likely the right default for most users - and that that should never be strongly enforced, because people should be allowed to define their own security model, and whatever set of threats I’m worried about, someone else may have a good reason to focus on different ones.
Code that runs on the CPU before the OS is still usually described as firmware - UEFI is firmware even though it’s executing on the CPU, which should give a strong indication that the difference between “firmware” and “software” is largely arbitrary ↩︎
Because UEFI makes everything more complicated, UEFI makes this more complicated. Triggering a UEFI runtime service involves your OS jumping into firmware code at runtime, in the same context as the OS kernel. Sometimes this will trigger a jump into System Management Mode, but other times it won’t, and it’s just your kernel executing code that got dumped into RAM when your system booted. ↩︎
I don’t understand most of the diff between one kernel version and the next, and I don’t have time to read all of it either. ↩︎
There’s a bunch of reasons to do this, the most reasonable of which is probably not wanting customers to replace the code and break their hardware and deal with the support overhead of that, but not being able to replace code running on hardware I own is always going to be an affront to me. ↩︎
ODCs (Orbital Data Centers — zaitcev) will happen. The incentives are aligned from too many directions for them not to. But if you’re still debating whether datacenters in space “make sense,” you’ve missed the point.
The real story is a technology revolution hiding in plain sight. Access to space has transformed over the last decade. Space and terrestrial infrastructure are converging into a single global system. ... Whether any particular infrastructure bet succeeds in the near term matters far less than the fact that the underlying transformation is structural and self-reinforcing.
Someone wrote about the collapse of MinIO (as an open-source project):
The CNCF badge isn’t a safety net. MinIO was a CNCF-associated project. That association didn’t prevent any of this. The CNCF doesn’t control the licensing or business decisions of associated projects. If your risk model assumes that CNCF membership means long-term stability, MinIO is your counterexample.
Swift is not mentioned among the possible alternative by the author.
As described previously, the Linux kernel security team does not identify or mark or announce any sort of security fixes that are made to the Linux kernel tree. So how, if the Linux kernel were to become a CVE Numbering Authority (CNA) and responsible for issuing CVEs, would the identification of security fixes happen in a way that can be done by a volunteer staff? This post goes into the process of how kernel fixes are currently automatically assigned to CVEs, and also the other “out of band” ways a CVE can be issued for the Linux kernel project.
This topic came up at kernel maintainers summit and some other groups have been playing around with it, particularly the BPF folks, and Chris Mason's work on kernel review prompts[1] for regressions. Red Hat have asked engineers to investigate some workflow enhancements with AI tooling, so I decided to let the vibecoding off the leash.
My main goal:
- Provide AI led patch review for drm patches
- Don't pollute the mailing list with them at least initially.
This led me to wanting to use lei/b4 tools, and public-inbox. If I could push the patches with message-ids and the review reply to a public-inbox I could just publish that and point people at it, and they could consume it using lei into their favorite mbox or browse it on the web.
I got claude to run with this idea, and it produced a project [2] that I've been refining for a couple of days.
I started with trying to use Chris' prompts, but screwed that up a bit due to sandboxing, but then I started iterating on using them and diverged.
The prompts are very directed at regression testing and single patch review, the patches get applied one-by-one to the tree, and the top patch gets the exhaustive regression testing. I realised I probably can't afford this, but it's also not exactly what I want.
I wanted a review of the overall series, but also a deeper per-patch review. I didn't really want to have to apply them to a tree, as drm patches are often difficult to figure out the base tree for them. I did want to give claude access to a drm-next tree so it could try apply patches, and if it worked it might increase the review, but if not it would fallback to just using the tree as a reference.
Some holes claude fell into, claude when run in batch mode has limits on turns it can take (opening patch files and opening kernel files for reference etc), giving it a large context can sometimes not leave it enough space to finish reviews on large patch series. It tried to inline patches into the prompt before I pointed out that would be bad, it tried to use the review instructions and open a lot of drm files, which ran out of turns. In the end I asked it to summarise the review prompts with some drm specific bits, and produce a working prompt. I'm sure there is plenty of tuning left to do with it.
Anyways I'm having my local claude run the poll loop every so often and processing new patches from the list. The results end up in the public-inbox[3], thanks to Benjamin Tissoires for setting up the git to public-inbox webhook.
I'd like for patch submitters to use this for some initial feedback, but it's also something that you should feel free to ignore, but I think if we find regressions in the reviews and they've been ignored, then I'll started suggesting it stronger. I don't expect reviewers to review it unless they want to. It was also suggested that perhaps I could fold in review replies as they happen into another review, and this might have some value, but I haven't written it yet. If on the initial review of a patch there is replies it will parse them, but won't do it later.
[1] https://github.com/masoncl/review-prompts
[2] https://gitlab.freedesktop.org/airlied/patch-reviewer
[3] https://lore.gitlab.freedesktop.org/drm-ai-reviews/
The staggering and fast-growing cost of AI datacenters is a call for performance engineering like no other in history; it's not just about saving costs – it's about saving the planet. I have joined OpenAI to work on this challenge directly, with an initial focus on ChatGPT performance. The scale is extreme and the growth is mind-boggling. As a leader in datacenter performance, I've realized that performance engineering as we know it may not be enough – I'm thinking of new engineering methods so that we can find bigger optimizations than we have before, and find them faster. It's the opportunity of a lifetime and, unlike in mature environments of scale, it feels as if there are no obstacles – no areas considered too difficult to change. Do anything, do it at scale, and do it today.
Why OpenAI exactly? I had talked to industry experts and friends who recommended several companies, especially OpenAI. However, I was still a bit cynical about AI adoption. Like everyone, I was being bombarded with ads by various companies to use AI, but I wondered: was anyone actually using it? Everyday people with everyday uses? One day during a busy period of interviewing, I realized I needed a haircut (as it happened, it was the day before I was due to speak with Sam Altman).
Mia the hairstylist got to work, and casually asked what I do for a living. "I'm an Intel fellow, I work on datacenter performance." Silence. Maybe she didn't know what datacenters were or who Intel was. I followed up: "I'm interviewing for a new job to work on AI datacenters." Mia lit up: "Oh, I use ChatGPT all the time!" While she was cutting my hair – which takes a while – she told me about her many uses of ChatGPT. (I, of course, was a captive audience.) She described uses I hadn't thought of, and I realized how ChatGPT was becoming an essential tool for everyone. Just one example: She was worried about a friend who was travelling in a far-away city, with little timezone overlap when they could chat, but she could talk to ChatGPT anytime about what the city was like and what tourist activities her friend might be doing, which helped her feel connected. She liked the memory feature too, saying it was like talking to a person who was living there.
I had previously chatted to other random people about AI, including a realtor, a tax accountant, and a part-time beekeeper. All told me enthusiastically about their uses of ChatGPT; the beekeeper, for example, uses it to help with small business paperwork. My wife was already a big user, and I was using it more and more, e.g. to sanity-check quotes from tradespeople. Now my hairstylist, who recognized ChatGPT as a brand more readily than she did Intel, was praising the technology and teaching me about it. I stood on the street after my haircut and let sink in how big this was, how this technology has become an essential aide for so many, how I could lead performance efforts and help save the planet. Joining OpenAI might be the biggest opportunity of my lifetime.
It's nice to work on something big that many people recognize and appreciate. I felt this when working at Netflix, and I'd been missing that human connection when I changed jobs. But there are other factors to consider beyond a well-known product: what's my role, who am I doing it with, and what is the compensation?
I ended up having 26 interviews and meetings (of course I kept a log) with various AI tech giants, so I learned a lot about the engineering work they are doing and the engineers who do it. The work itself reminds me of Netflix cloud engineering: huge scale, cloud computing challenges, fast-paced code changes, and freedom for engineers to make an impact. Lots of very interesting engineering problems across the stack. It's not just GPUs, it's everything.
The engineers I met were impressive: the AI giants have been very selective, to the point that I wasn't totally sure I'd pass the interviews myself. Of the companies I talked to, OpenAI had the largest number of talented engineers I already knew, including former Netflix colleagues such as Vadim who was encouraging me to join. At Netflix, Vadim would bring me performance issues and watch over my shoulder as I debugged and fixed them. It's a big plus to have someone at a company who knows you well, knows the work, and thinks you'll be good at the work.
Some people may be excited by what it means for OpenAI to hire me, a well known figure in computer performance, and of course I'd like to do great things. But to be fair on my fellow staff, there are many performance engineers already at OpenAI, including veterans I know from the industry, and they have been busy finding important wins. I'm not the first, I'm just the latest.
AI was also an early dream of mine. As a child I was a fan of British SciFi, including Blake's 7 (1978-1981) which featured a sarcastic, opinionated supercomputer named Orac. Characters could talk to Orac and ask it to do research tasks. Orac could communicate with all other computers in the universe, delegate work to them, and control them (this was very futuristic in 1978, pre-Internet as we know it).
Orac was considered the most valuable thing in the Blake's 7 universe, and by the time I was a university engineering student I wanted to build Orac. So I started developing my own natural language processing software. I didn't get very far, though: main memory at the time wasn't large enough to store an entire dictionary plus metadata. I visited a PC vendor with my requirements and they laughed, telling me to buy a mainframe instead. I realized I needed it to distinguish hot versus cold data and leave cold data on disk, and maybe I should be using a database… and that was about where I left that project.
Last year I started using ChatGPT, and wondered if it knew about Blake's 7 and Orac. So I asked:
ChatGPT's response nails the character. I added it to Settings->Personalization->Custom Instructions, and now it always answers as Orac. I love it. (There's also surprising news for Blake's 7 fans: A reboot was just announced!)
I am now a Member of Technical Staff for OpenAI, working remotely from Sydney, Australia, and reporting to Justin Becker. The team I've joined is ChatGPT performance engineering, and I'll be working with the other performance engineering teams at the company. One of my first projects is a multi-org strategy for improving performance and reducing costs.
There's so many interesting things to work on, things I have done before and things I haven't. I'm already using Codex for more than just coding. Will I be doing more eBPF, Ftrace, PMCs? I'm starting with OpenAI's needs and seeing where that takes me; but given those technologies are proven for finding datacenter performance wins, it seems likely -- I can lead the way. (And if everything I've described here sounds interesting to you, OpenAI is hiring.)
I was at Linux Plumber's Conference in Toyko in December, just after I announced leaving Intel, and dozens of people wanted to know where I was going next and why. I thought I'd write this blog post to answer everyone at once. I also need to finish part 2 of hiring a performance engineering team (it was already drafted before I joined OpenAI). I haven't forgotten.
It took months to wrap up my prior job and start at OpenAI, so I was due for another haircut. I thought it'd be neat to ask Mia about ChatGPT now that I work on it, then realized it had been months and she could have changed her mind. I asked nervously: "Still using ChatGPT?". Mia responded confidently: "twenty-four seven!"
I checked with Mia, she was thrilled to be mentioned in my post. This is also a personal post: no one asked me to write this.
Just to keep up some blogging content, I'll do where did I spend/waste time last couple of weeks.
I was working on two nouveau kernel bugs in parallel (in between whatever else I was doing).
Bug 1: Lyude, 2 or 3 weeks ago identified the RTX6000 Ada GPU wasn't resuming from suspend. I plugged in my one and indeed it wasn't. Turned out since we moved to 570 firmware, this has been broken. We started digging down various holes on what changed, sent NVIDIA debug traces to decode for us. NVIDIA identified that suspend was actually failing but the result wasn't getting propogated up. At least the opengpu driver was working properly.
I started writing patches for all the various differences between nouveau and opengpu in terms of what we send to the firmware, but none of them were making a difference.
I took a tangent, and decided to try and drop the latest 570.207 firmware into place instead of 570.144. NVIDIA have made attempts to keep the firmware in one stream more ABI stable. 570.207 failed to suspend, but for a different reason.
It turns out GSP RPC messages have two levels of sequence numbering, one on the command queue, and one on the RPC. We weren't filling in the RPC one, and somewhere in the later 570's someone found a reason to care. Now it turned out whenever we boot on 570 firmware we get a bunch of async msgs from GSP, with the word ASSERT in them with no additional info. Looks like at least some of those messages were due to our missing sequence numbers and fixing that stopped those.
And then? still didn't suspend/resume. Dug into memory allocations, framebuffer suspend/resume allocations. Until Milos on discord said you did confirm the INTERNAL_FBSR_INIT packet is the same, and indeed it wasn't. There is a flag bEnteringGCOff, which you set if you are entering into graphics off suspend state, however for normal suspend/resume instead of runtime suspend/resume, we shouldn't tell the firmware we are going to gcoff for some reason. Fixing that fixed suspend/resume.
While I was head down on fixing this, the bug trickled up into a few other places and I had complaints from a laptop vendor and RH internal QA all lined up when I found the fix. The fix is now in drm-misc-fixes.
Bug 2: A while ago Mary, a nouveau developer, enabled larger pages support in the kernel/mesa for nouveau/nvk. This enables a number of cool things like compression and gives good speedups for games. However Mel, another nvk developer reported random page faults running Vulkan CTS with large pages enabled. Mary produced a workaround which would have violated some locking rules, but showed that there was some race in the page table reference counting.
NVIDIA GPUs post pascal, have a concept of a dual page table. At the 64k level you can have two tables, one with 64K entries, and one with 4K entries, and the addresses of both are put in the page directory. The hardware then uses the state of entries in the 64k pages to decide what to do with the 4k entries. nouveau creates these 4k/64k tables dynamically and reference counts them. However the nouveau code was written pre VMBIND, and fully expected the operation ordering to be reference/map/unmap/unreference, and we would always do a complete cycle on 4k before moving to 64k and vice versa. However VMBIND means we delay unrefs to a safe place, which might be after refs happen. Fun things like ref 4k, map 4k, unmap 4k, ref 64k, map 64k, unref 4k, unmap 64k, unref 64k can happen, and the code just wasn't ready to handle those. Unref on 4k would sometimes overwrite the entry in the 64k table to invalid, even when it was valid. This took a lot of thought and 5 or 6 iterations on ideas before we stopped seeing fails. In the end the main things were to reference count the 4k/64k ref/unref separately, but also the last thing to do a map operation owned the 64k entry, which should conform to how userspace uses this interface.
The fixes for this are now in drm-misc-next-fixes.
Thanks to everyone who helped, Lyude/Milos on the suspend/resume, Mary/Mel on the page tables.
I really like the idea of using biometrics to add extra security, but have always hated the idea that simply touching the fingerprint sensor would unlock your entire phone, so in my version of LineageOS the touch to unlock feature is disabled but I still use second factor biometrics for the security of various apps. Effectively the android unlock policy is Fingerprint OR PIN/Pattern/Password and I simply want that OR to become an AND.
The idea of using two factor authentication (2FA) was pioneered by GrapheneOS but since I like the smallness of the Pixel 3 that’s not available to me (plus it only seems to work with pin and fingerprint and my preferred unlock is pattern). However, since I build my own LineageOS anyway (so I can sign and secure boot it) I thought I’d look into adding the feature … porting from GrapheneOS should be easy, right? In fact, when looking in the GrapheneOS code for frameworks/base, there are about nine commits adding the feature:
a7a19bf8fb98 add second factor to fingerprint unlock
5dd0e04f82cd add second factor UI
9cc17fd97296 add second factor to FingerprintService
c92a23473f3f add second factor to LockPattern classes
c504b05c933a add second factor to TrustManagerService
0aa7b9ec8408 add second factor to AdaptiveAuthService
62bbdf359687 add second factor to LockSettingsStateListener
7429cc13f971 add second factor to LockSettingsService
6e2d499a37a2 add second factor to DevicePolicyManagerServiceAnd a diffstat of over 3,000 lines … which seems a bit much for changing an OR to an AND. Of course, the reason it’s so huge is because they didn’t change the OR, they implemented an entirely new bouncer (bouncer being the android term in the code for authorisation gateway) that did pin and fingerprint in addition to the other three bouncers doing pattern, pin and password. So not only would I have to port 3,000 lines of code, but if I want a bouncer doing fingerprint and pattern, I’d have to write it. I mean colour me lazy but that seems way too much work for such an apparently simple change.
So is it actually easy? The rest of this post documents my quest to find out. Android code itself isn’t always easy to read: being Java it’s object oriented, but the curse of object orientation is that immediately after you’ve written the code, you realise you got the object model wrong and it needs to be refactored … then you realise the same thing after the first refactor and so on until you either go insane or give up. Even worse when many people write the code they all end up with slightly different views of what the object model should be. The result is what you see in Android today: model inconsistency and redundancy which get in the way when you try to understand the code flow simply by reading it. One stroke of luck was that there is actually only a single method all of the unlock types other than fingerprint go through KeyguardSecurityContainerController.showNextSecurityScreenOrFinish() with fingerprint unlocking going via a listener to the KeyguardUpdateMonitorCallback.onBiometricAuthenticated(). And, thanks to already disabling fingerprint only unlock, I know that if I simply stop triggering the latter event, it’s enough to disable fingerprint only unlock and all remaining authentication goes through the former callback. So to implement the required AND function, I just have to do this and check that a fingerprint authentication is also present in showNext.. (handily signalled by KeyguardUpdateMonitor.userUnlockedWithBiometric()). The latter being set fairly late in the sequence that does the onBiometricAuthenticated() callback (so I have to cut it off after this to prevent fingerprint only unlock). As part of the Android redundancy, there’s already a check for fingerprint unlock as its own segment of a big if/else statement in the showNext.. code; it’s probably a vestige from a different fingerprint unlock mechanism but I disabled it when the user enables 2FA just in case. There’s also an insanely complex set of listeners for updating the messages on the lockscreen to guide the user through unlocking, which I decided not to change (if you enable 2FA, you need to know how to use it). Finally, I diverted the code that would call the onBiometricAuthenticated() and instead routed it to onBiometricDetected() which triggers the LockScreen bouncer to pop up, so now you wake your phone, touch the fingerprint to the back, when authenticated, it pops up the bouncer and you enter your pin/pattern/password … neat (and simple)!
Well, not so fast. While the code above works perfectly if the lockscreen is listening for fingerprints, there are two cases where it doesn’t: if the phone is in lockdown or on first boot (because the Android way of not allowing fingerprint only authentication for those cases is not to listen for it). At this stage, my test phone is actually unusable because I can never supply the required fingerprint for 2FA unlocking. Fortunately a rooted adb can update the 2FA in the secure settings service: simply run sqlite3 on /data/system/locksettings.db and flip user_2fa from 1 to 0.
The fingerprint listener is started in KeyguardUpdateMonitor, but it has a fairly huge set of conditions in updateFingerprintListeningState() which is also overloaded by doing detection as well as authentication. In the end it’s not as difficult as it looks: shouldListenForFingerprint needs to be true and runDetect needs to be false. However, even then it doesn’t actually work (although debugging confirms it’s trying to start the fingerprint listening service); after a lot more debugging it turns out that the biometric server process, which runs fingerprint detection and authentication, also has a redundant check for whether the phone is encrypted or in lockdown and refuses to start if it is, which also now needs to return false for 2FA and bingo, it works in all circumstances.
The final diffstat for all of this is
5 files changed, 55 insertions(+), 3 deletions(-)So I’d say that is way simpler than the GrapheneOS one. All that remains is to add a switch for the setting (under the fingerprint settings) in packages/apps/Settings and it’s done. If you’re brave enough to try this for yourself you can go to my github account and get both the frameworks and settings commits (if you don’t want fingerprint unlock disable when 2FA isn’t selected, you’ll have to remove the head commit in frameworks). I suppose I should also add I’ve up-ported all of my other security stuff and am now on Android-15 (LineageOS-22.2).
Great, I am unable to comment at BG.
Theoretically, I have a spare place at Meenuvia, but that platform is also in decline. The owner, Pixy, has no time even to fix the slug problem that cropped up a few months ago (how do you regress a platform that was stable for 20 years, I don't know).
Most likely, I'll give up on blogging entirely, and move to Twitter or Fediverse.
Wikipedia says “An IBM PC compatible is any personal computer that is hardware- and software-compatible with the IBM Personal Computer (IBM PC) and its subsequent models”. But what does this actually mean? The obvious literal interpretation is for a device to be PC compatible, all software originally written for the IBM 5150 must run on it. Is this a reasonable definition? Is it one that any modern hardware can meet?
Before we dig into that, let’s go back to the early days of the x86 industry. IBM had launched the PC built almost entirely around off-the-shelf Intel components, and shipped full schematics in the IBM PC Technical Reference Manual. Anyone could buy the same parts from Intel and build a compatible board. They’d still need an operating system, but Microsoft was happy to sell MS-DOS to anyone who’d turn up with money. The only thing stopping people from cloning the entire board was the BIOS, the component that sat between the raw hardware and much of the software running on it. The concept of a BIOS originated in CP/M, an operating system originally written in the 70s for systems based on the Intel 8080. At that point in time there was no meaningful standardisation - systems might use the same CPU but otherwise have entirely different hardware, and any software that made assumptions about the underlying hardware wouldn’t run elsewhere. CP/M’s BIOS was effectively an abstraction layer, a set of code that could be modified to suit the specific underlying hardware without needing to modify the rest of the OS. As long as applications only called BIOS functions, they didn’t need to care about the underlying hardware and would run on all systems that had a working CP/M port.
By 1979, boards based on the 8086, Intel’s successor to the 8080, were hitting the market. The 8086 wasn’t machine code compatible with the 8080, but 8080 assembly code could be assembled to 8086 instructions to simplify porting old code. Despite this, the 8086 version of CP/M was taking some time to appear, and a company called Seattle Computer Products started producing a new OS closely modelled on CP/M and using the same BIOS abstraction layer concept. When IBM started looking for an OS for their upcoming 8088 (an 8086 with an 8-bit data bus rather than a 16-bit one) based PC, a complicated chain of events resulted in Microsoft paying a one-off fee to Seattle Computer Products, porting their OS to IBM’s hardware, and the rest is history.
But one key part of this was that despite what was now MS-DOS existing only to support IBM’s hardware, the BIOS abstraction remained, and the BIOS was owned by the hardware vendor - in this case, IBM. One key difference, though, was that while CP/M systems typically included the BIOS on boot media, IBM integrated it into ROM. This meant that MS-DOS floppies didn’t include all the code needed to run on a PC - you needed IBM’s BIOS. To begin with this wasn’t obviously a problem in the US market since, in a way that seems extremely odd from where we are now in history, it wasn’t clear that machine code was actually copyrightable. In 1982 Williams v. Artic determined that it could be even if fixed in ROM - this ended up having broader industry impact in Apple v. Franklin and it became clear that clone machines making use of the original vendor’s ROM code wasn’t going to fly. Anyone wanting to make hardware compatible with the PC was going to have to find another way.
And here’s where things diverge somewhat. Compaq famously performed clean-room reverse engineering of the IBM BIOS to produce a functionally equivalent implementation without violating copyright. Other vendors, well, were less fastidious - they came up with BIOS implementations that either implemented a subset of IBM’s functionality, or didn’t implement all the same behavioural quirks, and compatibility was restricted. In this era several vendors shipped customised versions of MS-DOS that supported different hardware (which you’d think wouldn’t be necessary given that’s what the BIOS was for, but still), and the set of PC software that would run on their hardware varied wildly. This was the era where vendors even shipped systems based on the Intel 80186, an improved 8086 that was both faster than the 8086 at the same clock speed and was also available at higher clock speeds. Clone vendors saw an opportunity to ship hardware that outperformed the PC, and some of them went for it.
You’d think that IBM would have immediately jumped on this as well, but no - the 80186 integrated many components that were separate chips on 8086 (and 8088) based platforms, but crucially didn’t maintain compatibility. As long as everything went via the BIOS this shouldn’t have mattered, but there were many cases where going via the BIOS introduced performance overhead or simply didn’t offer the functionality that people wanted, and since this was the era of single-user operating systems with no memory protection, there was nothing stopping developers from just hitting the hardware directly to get what they wanted. Changing the underlying hardware would break them.
And that’s what happened. IBM was the biggest player, so people targeted IBM’s platform. When BIOS interfaces weren’t sufficient they hit the hardware directly - and even if they weren’t doing that, they’d end up depending on behavioural quirks of IBM’s BIOS implementation. The market for DOS-compatible but not PC-compatible mostly vanished, although there were notable exceptions - in Japan the PC-98 platform achieved significant success, largely as a result of the Japanese market being pretty distinct from the rest of the world at that point in time, but also because it actually handled Japanese at a point where the PC platform was basically restricted to ASCII or minor variants thereof.
So, things remained fairly stable for some time. Underlying hardware changed - the 80286 introduced the ability to access more than a megabyte of address space and would promptly have broken a bunch of things except IBM came up with an utterly terrifying hack that bit me back in 2009, and which ended up sufficiently codified into Intel design that it was one mechanism for breaking the original XBox security. The first 286 PC even introduced a new keyboard controller that supported better keyboards but which remained backwards compatible with the original PC to avoid breaking software. Even when IBM launched the PS/2, the first significant rearchitecture of the PC platform with a brand new expansion bus and associated patents to prevent people cloning it without paying off IBM, they made sure that all the hardware was backwards compatible. For decades, PC compatibility meant not only supporting the officially supported interfaces, it meant supporting the underlying hardware. This is what made it possible to ship install media that was expected to work on any PC, even if you’d need some additional media for hardware-specific drivers. It’s something that still distinguishes the PC market from the ARM desktop market. But it’s not as true as it used to be, and it’s interesting to think about whether it ever was as true as people thought.
Let’s take an extreme case. If I buy a modern laptop, can I run 1981-era DOS on it? The answer is clearly no. First, modern systems largely don’t implement the legacy BIOS. The entire abstraction layer that DOS relies on isn’t there, having been replaced with UEFI. When UEFI first appeared it generally shipped with a Compatibility Services Module, a layer that would translate BIOS interrupts into UEFI calls, allowing vendors to ship hardware with more modern firmware and drivers without having to duplicate them to support older operating systems1. Is this system PC compatible? By the strictest of definitions, no.
Ok. But the hardware is broadly the same, right? There’s projects like CSMWrap that allow a CSM to be implemented on top of stock UEFI, so everything that hits BIOS should work just fine. And well yes, assuming they implement the BIOS interfaces fully, anything using the BIOS interfaces will be happy. But what about stuff that doesn’t? Old software is going to expect that my Sound Blaster is going to be on a limited set of IRQs and is going to assume that it’s going to be able to install its own interrupt handler and ACK those on the interrupt controller itself and that’s really not going to work when you have a PCI card that’s been mapped onto some APIC vector, and also if your keyboard is attached via USB or SPI then reading it via the CSM will work (because it’s calling into UEFI to get the actual data) but trying to read the keyboard controller directly won’t2, so you’re still actually relying on the firmware to do the right thing but it’s not, because the average person who wants to run DOS on a modern computer owns three fursuits and some knee length socks and while you are important and vital and I love you all you’re not enough to actually convince a transglobal megacorp to flip the bit in the chipset that makes all this old stuff work.
But imagine you are, or imagine you’re the sort of person who (like me) thinks writing their own firmware for their weird Chinese Thinkpad knockoff motherboard is a good and sensible use of their time - can you make this work fully? Haha no of course not. Yes, you can probably make sure that the PCI Sound Blaster that’s plugged into a Thunderbolt dock has interrupt routing to something that is absolutely no longer an 8259 but is pretending to be so you can just handle IRQ 5 yourself, and you can probably still even write some SMM code that will make your keyboard work, but what about the corner cases? What if you’re trying to run something built with IBM Pascal 1.0? There’s a risk that it’ll assume that trying to access an address just over 1MB will give it the data stored just above 0, and now it’ll break. It’d work fine on an actual PC, and it won’t work here, so are we PC compatible?
That’s a very interesting abstract question and I’m going to entirely ignore it. Let’s talk about PC graphics3. The original PC shipped with two different optional graphics cards - the Monochrome Display Adapter and the Color Graphics Adapter. If you wanted to run games you were doing it on CGA, because MDA had no mechanism to address individual pixels so you could only render full characters. So, even on the original PC, there was software that would run on some hardware but not on other hardware.
Things got worse from there. CGA was, to put it mildly, shit. Even IBM knew this - in 1984 they launched the PCjr, intended to make the PC platform more attractive to home users. As well as maybe the worst keyboard ever to be associated with the IBM brand, IBM added some new video modes that allowed displaying more than 4 colours on screen at once4, and software that depended on that wouldn’t display correctly on an original PC. Of course, because the PCjr was a complete commercial failure, it wouldn’t display correctly on any future PCs either. This is going to become a theme.
There’s never been a properly specified PC graphics platform. BIOS support for advanced graphics modes5 ended up specified by VESA rather than IBM, and even then getting good performance involved hitting hardware directly. It wasn’t until Microsoft specced DirectX that anything was broadly usable even if you limited yourself to Microsoft platforms, and this was an OS-level API rather than a hardware one. If you stick to BIOS interfaces then CGA-era code will work fine on graphics hardware produced up until the 20-teens, but if you were trying to hit CGA hardware registers directly then you’re going to have a bad time. This isn’t even a new thing - even if we restrict ourselves to the authentic IBM PC range (and ignore the PCjr), by the time we get to the Enhanced Graphics Adapter we’re not entirely CGA compatible. Is an IBM PC/AT with EGA PC compatible? You’d likely say “yes”, but there’s software written for the original PC that won’t work there.
And, well, let’s go even more basic. The original PC had a well defined CPU frequency and a well defined CPU that would take a well defined number of cycles to execute any given instruction. People could write software that depended on that. When CPUs got faster, some software broke. This resulted in systems with a Turbo Button - a button that would drop the clock rate to something approximating the original PC so stuff would stop breaking. It’s fine, we’d later end up with Windows crashing on fast machines because hardware details will absolutely bleed through.
So, what’s a PC compatible? No modern PC will run the DOS that the original PC ran. If you try hard enough you can get it into a state where it’ll run most old software, as long as it doesn’t have assumptions about memory segmentation or your CPU or want to talk to your GPU directly. And even then it’ll potentially be unusable or crash because time is hard.
The truth is that there’s no way we can technically describe a PC Compatible now - or, honestly, ever. If you sent a modern PC back to 1981 the media would be amazed and also point out that it didn’t run Flight Simulator. “PC Compatible” is a socially defined construct, just like “Woman”. We can get hung up on the details or we can just chill.
Windows 7 is entirely happy to boot on UEFI systems except that it relies on being able to use a BIOS call to set the video mode during boot, which has resulted in things like UEFISeven to make that work on modern systems that don’t provide BIOS compatibility ↩︎
Back in the 90s and early 2000s operating systems didn’t necessarily have native drivers for USB input devices, so there was hardware support for trapping OS accesses to the keyboard controller and redirecting that into System Management Mode where some software that was invisible to the OS would speak to the USB controller and then fake a response anyway that’s how I made a laptop that could boot unmodified MacOS X ↩︎
(my name will not be Wolfwings Shadowflight) ↩︎
Yes yes ok 8088 MPH demonstrates that if you really want to you can do better than that on CGA ↩︎
and by advanced we’re still talking about the 90s, don’t get excited ↩︎
Lots of the CVE world seems to focus on “security bugs” but I’ve found that it is not all that well known exactly how the Linux kernel security process works. I gave a talk about this back in 2023 and at other conferences since then, attempting to explain how it works, but I also thought it would be good to explain this all in writing as it is required to know this when trying to understand how the Linux kernel CNA issues CVEs.
We are glad to announce that video recordings of the talks are available on our YouTube channel.
You can use the complete conference playlist or look for “video” links in each contribution in the schedule
With all of the different Linux kernel stable releases happening (at least 1 stable branch and multiple longterm branches are active at any one point in time), keeping track of what commits are already applied to what branch, and what branch specific fixes should be applied to, can quickly get to be a very complex task if you attempt to do this manually. So I’ve created some tools to help make my life easier when doing the stable kernel maintenance work, which ended up making the work of tracking CVEs much simpler to manage in an automated way.
I presented an overview of the Ultraviolet Linux (UV) project at Linux Plumbers Conference (LPC) 2025.
UV is a proposed architecture and reference implementation for generalized code integrity in Linux. The goal of the presentation was to seek early feedback from the community and to invite collaboration — it’s at an early stage of development currently.
A copy of the slides may be found here (pdf).
Despite having a stable release model and cadence since December 2003, Linux kernel version numbers seem to baffle and confuse those that run across them, causing numerous groups to mistakenly make versioning statements that are flat out false. So let’s go into how this all works in detail.
It’s been almost 2 full years since Linux became a CNA (Certificate Numbering Authority) which meant that we (i.e. the kernel.org community) are now responsible for issuing all CVEs for the Linux kernel. During this time, we’ve become one of the largest creators of CVEs by quantity, going from nothing to number 3 in 2024 to number 1 in 2025. Naturally, this has caused some questions about how we are both doing all of this work, and how people can keep track of it.

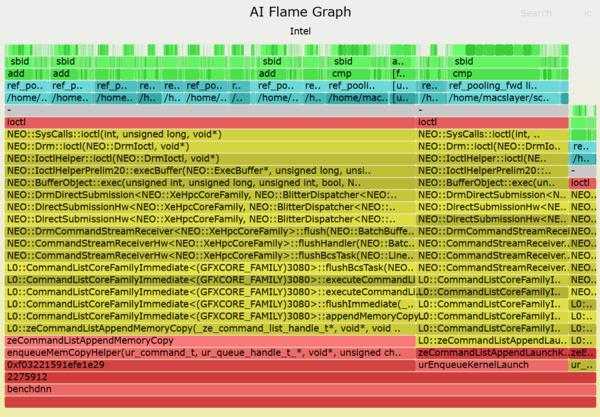
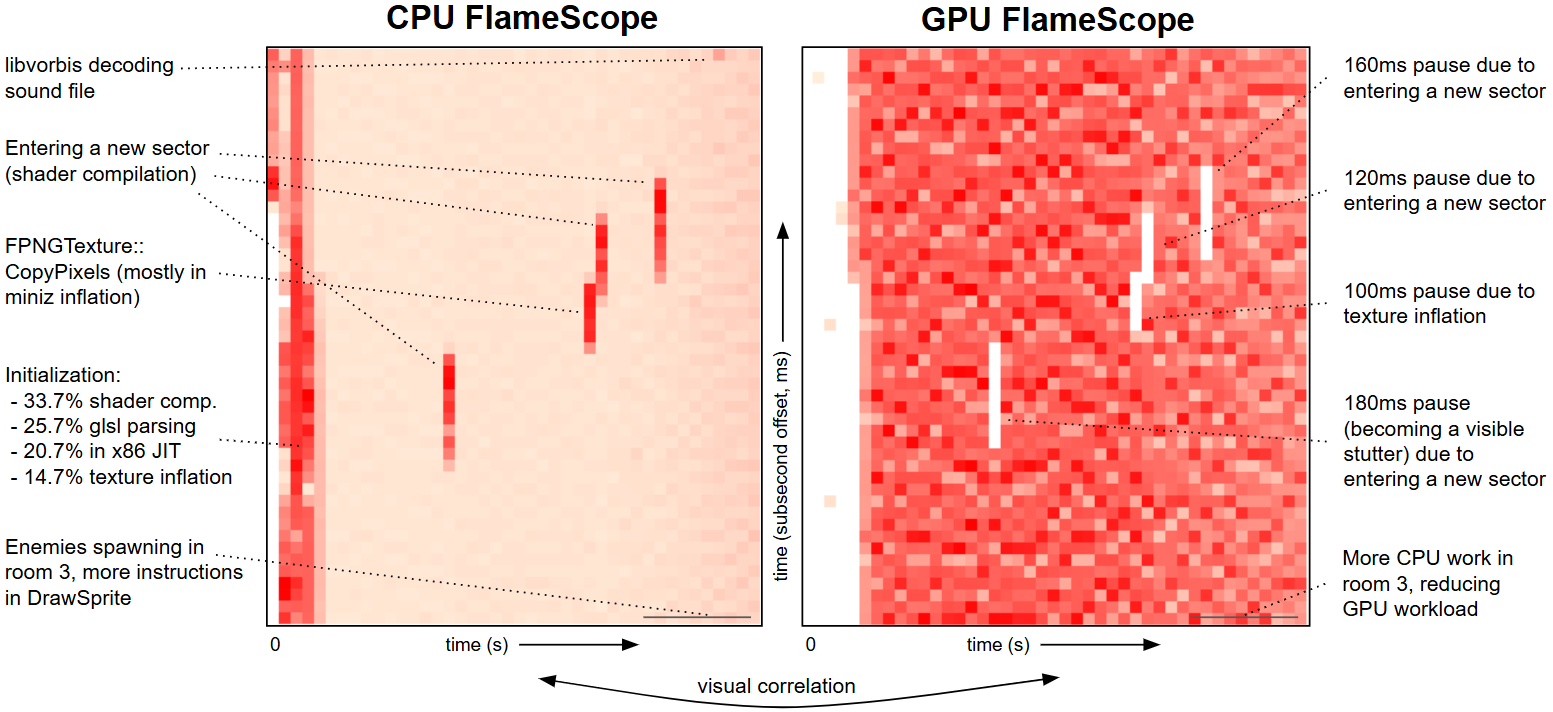




I've resigned from Intel and accepted a new opportunity. If you are an Intel employee, you might have seen my fairly long email that summarized what I did in my 3.5 years. Much of this is public:
It's still early days for AI flame graphs. Right now when I browse CPU performance case studies on the Internet, I'll often see a CPU flame graph as part of the analysis. We're a long way from that kind of adoption for GPUs (and it doesn't help that our open source version is Intel only), but I think as GPU code becomes more complex, with more layers, the need for AI flame graphs will keep increasing.
I also supported cloud computing, participating in 110 customer meetings, and created a company-wide strategy to win back the cloud with 33 specific recommendations, in collaboration with others across 6 organizations. It is some of my best work and features a visual map of interactions between all 19 relevant teams, described by Intel long-timers as the first time they have ever seen such a cross-company map. (This strategy, summarized in a slide deck, is internal only.)
I always wish I did more, in any job, but I'm glad to have contributed this much especially given the context: I overlapped with Intel's toughest 3 years in history, and I had a hiring freeze for my first 15 months.
My fond memories from Intel include meeting Linus at an Intel event who said "everyone is using fleme graphs these days" (Finnish accent), meeting Pat Gelsinger who knew about my work and introduced me to everyone at an exec all hands, surfing lessons at an Intel Australia and HP offsite (mp4), and meeting Harshad Sane (Intel cloud support engineer) who helped me when I was at Netflix and now has joined Netflix himself -- we've swapped ends of the meeting table. I also enjoyed meeting Intel's hardware fellows and senior fellows who were happy to help me understand processor internals. (Unrelated to Intel, but if you're a Who fan like me, I recently met some other people as well!)
My next few years at Intel would have focused on execution of those 33 recommendations, which Intel can continue to do in my absence. Most of my recommendations aren't easy, however, and require accepting change, ELT/CEO approval, and multiple quarters of investment. I won't be there to push them, but other employees can (my CloudTeams strategy is in the inbox of various ELT, and in a shared folder with all my presentations, code, and weekly status reports). This work will hopefully live on and keep making Intel stronger. Good luck.
There are now multiple AI performance engineering agents that use or are trained on my work. Some are helper agents that interpret flame graphs or eBPF metrics, sometimes privately called AI Brendan; others have trained on my work to create a virtual Brendan that claims it can tune everything just like the real thing. These virtual Brendans sound like my brain has been uploaded to the cloud by someone who is now selling it (yikes!). I've been told it's even "easy" to do this thanks to all my publications available to train on: >90 talks, >250 blog posts, >600 open source tools, and >3000 book pages. Are people allowed to sell you, virtually? And am I the first individual engineer to be AI'd? (There is a 30-year-old precedent for this, which I'll get to later.)
This is an emerging subject, with lots of different people, objectives, and money involved. Note that this is a personal post about my opinions, not an official post by my employer, so I won't be discussing internal details about any particular project. I'm also not here to recommend you buy any in particular.
Before I get into the AI/Virtual Brendans, yes, we've been using AI to help performance engineering for years. Developers have been using coding agents that can help write performant code. And as a performance engineer, I'm already using ChatGPT to save time on resarch tasks, like finding URLs for release notes and recent developments for a given technology. I once used ChatGPT to find and old patch sent to lkml, just based on a broad description, which would otherwise take hours of trial-and-error searches. I keep finding more ways that ChatGPT/AI is useful to me in my work.
A common approach is to take a CPU flame graph and have AI do pattern matching to find performance issues. Some of these agents will apply fixes as well. It's like a modern take on the practice of "recent performance issue checklists," just letting AI do the pattern matching instead of the field engineer.
I've recently worked on a Fast by Friday methodology: where we engineer systems so that performance can be root-cause analyzed in 5 days or less. Having an AI agent look over flame graphs, metrics, and other data sources to match previously seen issues will save time and help make Fast by Friday possible. For some companies with few or no performance engineers, I'd expect matching previously seen issues should find roughly 10-50% performance gains.
I've heard some flame graph agents privately referred to as an "AI Brendan" (or similar variation on my name) and I guess I should be glad that I'm getting some kind of credit for my work. Calling a systems performance agent "Brendan" makes more sense than other random names like Siri or Alexa, so long as end users understand it means a Brendan-like agent and not a full virtual Brendan. I've also suspected this day would come ever since I began my performance career (more on this later).
Challenges:
So it's easier to see this working as an in-house tool or an open source collaboration, one where it doesn't need to keep the changes secret and it can give fixes back to other upstream projects.
Now onto the sci-fi-like topic of a virtual me, just like the real thing.
Challenges:
The first such effort that I’m aware of was “Virtual Adrian” in 1994. Adrian Cockcroft, a performance engineering leader, had a software tool called Virtual Adrian that was described as: "Running this script is like having Adrian actually watching over your machine for you, whining about anything that doesn't look well tuned." (Sun Performance and Tuning 2nd Ed, 1998, page 498). It both analyzed and applied tuning, but it wasn't AI, it was rule-based. I think it was the first such agent based on a real individual. That book was also the start of my own performance career: I read it and Solaris Internals to see if I could handle and enjoy the topic; I didn't just enjoy it, I fell in love with performance engineering. So I've long known about virtual Adrian, and long suspected that one day there might be a virtual Brendan.
There have been other rule-based auto tuners since then, although not named after an individual. Red Hat maintains one called TuneD: a "Daemon for monitoring and adaptive tuning of system devices." Oracle has a newer one called bpftune (by Alan Maguire) based on eBPF. (Perhaps it should be called "Virtual Alan"?)
Machine learning was introduced by 2010. At the time, I met with mathematicians who were applying machine learning to all the system metrics to identify performance issues. As mathematicians, they were not experts in systems performance and they assumed that system metrics were trustworthy and complete. I explained that their product actually had a "garbage in garbage out" problem – some metrics were unreliable, and there were many blind spots, which I have been helping fix with my tools. My advice was to fix the system metrics first, then do ML, but it never happened.
AI-based auto-tuning companies arrived by 2020: Granulate in 2018 and Akamas in 2019. Granulate were pioneers in this space, with a product that could automatically tune software using AI with no code changes required. In 2022 Intel acquired Granulate, a company of 120 staff, reportedly for USD$650M, to boost cloud and datacenter performance. As shared at Intel Vision, Granulate fit into an optimization strategy where it would help application performance, accomplishing for example "approximately 30% CPU reduction on Ruby and Java." Sounds good. As Intel's press release described, Granulate was expected to lean on Intel's 19,000 software engineers to help it expand its capabilities.
The years that followed were tough for Intel in general. Granulate was renamed "Intel Tiber App-Level Optimization." By 2025 the entire project was reportedly for sale but, apparently finding no takers, the project was simply shut down. An Intel press release stated: "As part of Intel's transformation process, we continue to actively review each part of our product portfolio to ensure alignment with our strategic goals and core business. After extensive consideration, we have made the difficult decision to discontinue the Intel Tiber App-Level Optimization product line."
I learned about Granulate in my first days at Intel. I was told their product was entirely based on my work, using flame graphs for code profiling and my publications for tuning, and that as part of my new job I had to support it. It was also a complex project, as there was also a lot of infrastructure code for safe orchestration of tuning changes, which is not an easy problem. Flame graphs were the key interface: the first time I saw them demo their product they wanted to highlight their dynamic version of flame graphs thinking I hadn't seen them before, but I recognized them as d3-flame-graphs that Martin Spier and I created at Netflix.
It was a bit dizzying to think that my work had just been "AI'd" and sold for $650M, but I wasn't in a position to complain since it was now a project of my employer. But it was also exciting, in a sci-fi kind of way, to think that an AI Brendan could help tune the world, sharing all the solutions I'd previously published so I didn't have to repeat them for the umpteenth time. It would give me more time to focus on new stuff.
The most difficult experience I had wasn't with the people building the tool: they were happy I joined Intel (I heard they gave the CTO a standing ovation when he announced it). I also recognized that automating my prior tuning for everyone would be good for the planet. The difficulty was with others on the periphery (business people) who were not directly involved and didn't have performance expertise, but were gung ho on the idea of an AI performance engineering agent. Specifically, a Virtual Brendan that could be sold to everyone. I (human Brendan and performance expert) had no role or say in these ideas, as there was this sense of: "now we've copied your brain we don't need you anymore, get out of our way so we can sell it." This was the only time I had concerns about the impact of AI on my career. It wasn't the risk of being replaced by a better AI, it was being replaced by a worse one that people think is better, and with a marketing budget to make everyone else think it's better. Human me wouldn't stand a chance.
2025 and beyond: As an example of an in-house agent, Uber has one called PerfInsights that analyzes code profiles to find optimizations. And I learned about another agent, Linnix: AI-Powered Observability, while writing this post.
There are far more computers in the world than performance engineers to tune them, leaving most running untuned and wasting resources. In future there will be AI performance agents that can be run on everything, helping to save the planet by reducing energy usage. Some will be described as an AI Brendan or a Virtual Brendan (some already have been) but that doesn't mean they are necessarily trained on all my work or had any direct help from me creating it. (Nor did they abduct me and feed me into a steampunk machine that uploaded my brain to the cloud.) Virtual Brendans only try to automate about 15% of my job (see my prior post for "What do performance engineers do?").
Intel and the AI auto-tuning startup it acquired for $650M (based on my work) were pioneers in this space, but after Intel invested more time and resources into the project it was shut down. That doesn't mean the idea was bad -- Intel's public statement about the shutdown only mentions a core business review -- and this happened while Intel has been struggling in general (as has been widely reported).
Commercial AI auto-tuners have extra challenges: customers may only pay for one server/instance then copy-n-paste the tuning changes everywhere. Similar to the established pricing model of hiring a performance consultant. For 3rd-party code, someone at some point will have the bright idea to upstream any change an AI auto-tuner suggestss, so a commercial offering will keep losing whatever tuning advantages it develops. In-house tools don't have these same concerns, and perhaps that's the real future of AI tuning agents: an in-house or non-commercial open source collaboration.
F43 picked up the two patches I created to fix a bunch of deadlocks on laptops reported in my previous blog posting. Turns out Vulkan layers have a subtle thing I missed, and I removed a line from the device select layer that would only matter if you have another layer, which happens under steam.
The fedora update process caught this, but it still got published which was a mistake, need to probably give changes like this more karma thresholds.
I've released a new update https://bodhi.fedoraproject.org/updates/FEDORA-2025-2f4ba7cd17 that hopefully fixes this. I'll keep an eye on the karma.
Intel's new CEO, Lip-Bu Tan, has made listening to customers a top priority, saying at Intel Vision earlier this year: "Please be brutally honest with us. This is what I expect of you this week, and I believe harsh feedback is most valuable."
I'd been in regular meetings with Intel for several years before I joined, and I had been giving them technical direction on various projects, including at times some brutal feedback. When I finally interviewed for a role at Intel I was told something unexpected: that I had already accomplished so much within Intel that I qualified to be an Intel Fellow candidate. I then had to pass several extra interviews to actually become a Fellow (and was told I may only be the third person in Intel's history to be hired as a Fellow) but what stuck with me was that I had already accomplished so much at a company I'd never worked for.
If you are in regular meetings with a hardware vendor as a customer (or potential customer) you can accomplish a lot by providing firm and tough feedback, particularly with Intel today. This is easier said than done, however.
Now that I've seen it from the other side I realize I could have accomplished more, and you can too. I regret the meetings where I wasn't really able to have my feedback land as the staff weren't really getting it, so I eventually gave up. After the meeting I'd crack jokes with my colleagues about how the product would likely fail. (Come on, at least I tried to tell them!)
Here's what I wish I had done in any hardware vendor meeting:
I'm now in meetings from the other side where we'd really appreciate brutal feedback, but some customers aren't comfortable doing this, even when prompted. It isn't easy to tell someone their project is doomed, or that their reasons for not doing something are BS. It isn't easy dealing with peer pressure and a room of warm and friendly staff begging you say something, anything nice about their terrible product for fear of losing their jobs -- and realizing you must be brutal to their faces otherwise you're not helping the vendor or your own company. And it's extra effort to check meeting minutes and to push for meetings with the ELT or the CEO. Giving brutal feedback takes brutal effort.
Dear speakers,
You can find the LPC 2025 slides templates in different formats in the following link:
https://drive.google.com/drive/folders/1oGQz6MXtq7fjRJS0Q7Q_oBI91g38VFOC
They were created by our designer, Zohar Nir-Amitin. Zohar has been working with LPC since 2015, and has created all our wonderful t-shirts, badges and signage designs.
The real performance of any computer hardware in production is the result of the hardware, software, and tuning; the investment and sequence of these efforts can be pictured as a three-stage rocket:
I recently presented this embarrassingly simple diagram to Intel's executive leadership, and at the time realized the value of sharing it publicly. The Internet is awash with comparisons about Intel (and other vendors’) product performance based on hardware performance alone, but the performance of software and then tuning can make a huge difference for your particular workload. You need all three stages to reach the highest, and most competitive, performance.
It's obvious why this is important for HW vendors to understand internally – they, like the Internet, can get overly focused on HW alone. But customers need to understand it as well. If a benchmark is comparing TensorFlow performance between HW vendors, was the Intel hardware tested using the Intel Extension for TensorFlow Software, and was it then tuned? The most accurate and realistic evaluation for HW involves selecting the best software and then tuning it, and doing this for all HW options.
I spend a lot of time on the final stage, tuning – what I call third-stage engineering. It's composed of roughly four parts: People, training, tools, and capabilities. You need staff, you need them trained to understand performance methodologies and SW and HW internals, they need tools to analyze the system (both observational and experimental), and finally they need capabilities to tune (tunable parameters, settings, config, code changes, etc.).
I see too many HW evaluations that are trying to understand customer performance but are considering HW alone, which is like only testing the first stage of a rocket. This doesn't help vendors or customers. I hope that's what my simple diagram makes obvious: We need all three stages to reach the highest altitude.
I had a bug appear in my email recently which led me down a rabbit hole, and I'm going to share it for future people wondering why we can't have nice things.
1. Get an intel/nvidia (newer than Turing) laptop.
2. Log in to GNOME on Fedora 42/43
3. Hotplug a HDMI port that is connected to the NVIDIA GPU.
4. Desktop stops working.
My initial reproduction got me a hung mutter process with a nice backtrace which pointed at the Vulkan Mesa device selection layer, trying to talk to the wayland compositor to ask it what the default device is. The problem was the process was the wayland compositor, and how was this ever supposed to work. The Vulkan device selection was called because zink called EnumeratePhysicalDevices, and zink was being loaded because we recently switched to it as the OpenGL driver for newer NVIDIA GPUs.
I looked into zink and the device select layer code, and low and behold someone has hacked around this badly already, and probably wrongly and I've no idea what the code does, because I think there is at least one logic bug in it. Nice things can't be had because hacks were done instead of just solving the problem.
The hacks in place ensured under certain circumstances involving zink/xwayland that the device select code to probe the window system was disabled, due to deadlocks seen. I'd no idea if more hacks were going to help, so I decided to step back and try and work out better.
The first question I had is why WAYLAND_DISPLAY is set inside the compositor process, it is, and if it wasn't I would never hit this. It's pretty likely on the initial compositor start this env var isn't set, so the problem only becomes apparent when the compositor gets a hotplugged GPU output, and goes to load the OpenGL driver, zink, which enumerates and hits device select with env var set and deadlocks.
I wasn't going to figure out a way around WAYLAND_DISPLAY being set at this point, so I leave the above question as an exercise for mutter devs.
At the point where zink is loading in mesa for this case, we have the file descriptor of the GPU device that we want to load a driver for. We don't actually need to enumerate all the physical devices, we could just find the ones for that fd. There is no API for this in Vulkan. I wrote an initial proof of concept instance extensions call VK_MESA_enumerate_devices_fd. I wrote initial loader code to play with it, and wrote zink code to use it. Because this is a new instance API, device-select will also ignore it. However this ran into a big problem in the Vulkan loader. The loader is designed around some internals that PhysicalDevices will enumerate in similiar ways, and it has to trampoline PhysicalDevice handles to underlying driver pointers so that if an app enumerates once, and enumerates again later, the PhysicalDevice handles remain consistent for the first user. There is a lot of code, and I've no idea how hotplug GPUs might fail in such situations. I couldn't find a decent path forward without knowing a lot more about the Vulkan loader. I believe this is the proper solution, as we know the fd, we should be able to get things without doing a full enumeration then picking the answer using the fd info. I've asked Vulkan WG to take a look at this, but I still need to fix the bug.
Maybe I can just turn off device selection, like the current hacks do, but in a better manner. Enter VK_EXT_layer_settings. This extensions allows layers to expose a layer setting in the instance creation. I can have the device select layer expose a setting which says don't touch this instance. Then in the zink code where we have a file descriptor being passed in and create an instance, we set the layer setting to avoid device selection. This seems to work but it has some caveats, I need to consider, but I think should be fine.
zink uses a single VkInstance for it's device screen. This is shared between all pipe_screens. Now I think this is fine inside a compositor, since we shouldn't ever be loading zink via the non-fd path, and I hope for most use cases it will work fine, better than the current hacks and better than some other ideas we threw around. The code for this is in [1].
If you have a vulkan compositor, it might be worth setting the layer setting if the mesa device select layer is loaded, esp if you set the DISPLAY/WAYLAND_DISPLAY and do any sort of hotplug later. You might be safe if you EnumeratePhysicalDevices early enough, the reason it's a big problem in mutter is it doesn't use Vulkan, it uses OpenGL and we only enumerate Vulkan physical devices at runtime through zink, never at startup.
AMD and NVIDIA I think have proprietary device selection layers, these might also deadlock in similiar ways, I think we've seen some wierd deadlocks in NVIDIA driver enumerations as well that might be a similiar problem.
[1] https://gitlab.freedesktop.org/mesa/mesa/-/merge_requests/38252
If you hold a passport from a visa exempt country, this doesn’t apply to you:
https://www.mofa.go.jp/j_info/visit/visa/short/novisa.html
But if you don’t have a passport from that list, you do need a visa. Unfortunately, the change of government in Japan has made the process for getting a visa more taxing on the body supplying the invitation letter (in our case, the Linux Foundation). For this reason, the LF is insisting that anyone who needs a visa letter have their application in to the LF dashboard by 17 November at the latest:
https://openprofile.dev/myevents?applyfor=visa-letter
If you have any queries or problems with the process, please contact visaletters@linuxfoundation.org
A guy who sits next to me is in his 70s, and he said: "I started out on a teletype." But I didn't. Not only I never lived in a world without computers, but when I started out, CRT displays were already a thing. Guys who worked on vacuum tube computers are in their 90s now.
Problem:
A submodule is stuck in a commit, like so:
$ git show
.................................... shows a stuck submodule
--- a/badsub
+++ b/badsub
@@ -1 +1 @@
-Subproject commit 4ba912892c1b8c213c6c2e78b3bf257635dc534e
+Subproject commit 4b813c322ebe236cddc6b3acd70a31994efd7a56
Solution:
Focus on the commit, not submodule. Submodules work as designed, it's the commit that needs to be fixed (with `git commit --amend`, obviously):
$ cd badsub
$ git checkout 4ba912892c1b8c213c6c2e78b3bf257635dc534e
$ cd ..
$ git add badsub
$ git commit --amend
Nowhere as bad as copying a file while preserving history. Still, not obvious if one focuses on `git submodule`.
Problem:
`podman container ls` warns:
WARN[0000] The cgroupv2 manager is set to systemd but there is no systemd user session available
Solution:
$ sudo apt install dbus-user-session; systemctl --user start dbus
…the one that emulates your real workload. And for me (and probably many of you reading this), that would be “build a kernel as fast as possible.” And for that, I recommend the simple kcbench.
I kcbench mentioned it a few years ago, when writing about a new workstation that Level One Techs set up for me, and I’ve been using that as my primary workstation ever since (just over 5 years!).
Apparently there was quite a bit more demand than we anticipated. We are running a waitlist which you can get on by filling in this form:
https://forms.gle/tYjjbyn66q5SQMLPA
The venue is smaller this year but we do have a block of reserved passes for MC content so we’ll allocate places to the waitlist after it’s decided how many of them get used. Note that in order to be fair to everyone, if you sign up for the waitlist you’ll have 7 days to register otherwise your pass will go to the next person.
We’re happy to announce that registration for LPC 2025 is now open. To register please go to our attend page.
To try to prevent the instant sellout, we are keeping our cancellation policy of no refunds, only transfers of registrations. You will find more details during the registration process. LPC 2025 follows the Linux Foundation’s health & safety policy.
As usual we expect to sell our rather quickly so don’t delay your registration for too long!
AMD have announced the end of the AMDVLK open driver in favour of focusing on radv for Linux use cases.
When Bas and I started radv in 2016, AMD were promising their own Linux vulkan driver, which arrived in Dec 2017. At this point radv was already shipping in most Linux distros. AMD strategy of having AMDVLK was developed via over the wall open source releases from internal closed development was always going to be a second place option at that point.
When Valve came on board and brought dedicated developer power to radv, and the aco compiler matured, there really was no point putting effort into using AMDVLK which was hard to package and impossible to contribute to meaningfully for external developers.
radv is probably my proudest contribution to the Linux ecosystem, finally disproving years of idiots saying an open source driver could never compete with a vendor provided driver, now it is the vendor provided driver.
I think we will miss the open source PAL repo as a reference source and I hope AMD engineers can bridge that gap, but it's often hard to find workarounds you don't know exist to ask about them. I'm also hoping AMD will add more staffing beyond the current levels especially around hardware enablement and workarounds.
Now onwards to NVK victory :-)
[1] https://github.com/GPUOpen-Drivers/AMDVLK/discussions/416
The CfPs for the Linux Plumbers events are coming to an end. If you still want to submit, please get your submission in by the deadline. The deadlines are:
Each of the Microconferences has their own last day to submit. Those are listed in the Accepted Microconferences tab on the website.
All submissions may be added in the Call for Proposals tab. Click the Submit new abstract button at the bottom of that page, and make sure you select the proper Track.
As a leader in computer performance I've been asked by companies about how (and why) to form a performance engineering team, and as this is broadly useful I'll share my advice here.
Large tech companies in the US hire performance engineers (under that or other titles) to ensure that infrastructure costs and service latency don't grow too high, and that their service is reliable under peak load. A new performance team can likely find enough optimizations to halve infrastructure spend in their first couple of years, even for companies that have been using commercial performance or observability tools. Performance engineers do much more than those tools, working with development teams and vendors to build, test, debug, tune, and adopt new performance solutions, and to find deep optimizations that those tools can miss.
I previously worked on the performance engineering team for Netflix, a large tech consumer running on hundreds of thousands of AWS instances. I'm now doing similar work at Intel (a large tech vendor) for Intel and their customers. As a leader in this space I've also interacted with other performance teams and staff doing performance work at many companies. In this post I'll explain what these teams do and when you should consider forming one. In part 2 I'll provide sample job descriptions, specialties, advice, pitfalls, comments on AI, and what to do if you can't hire a performance team.
It's easy for hardware vendors like Intel to justify hiring performance engineers, as the number one factor in sales is beating a competitor's performance. However, my focus in this post is on non-vendor tech-heavy companies who hire these staff to drive down costs and latency outliers (e.g., banks, telecomms, defence, AI, tech-based companies, and anyone else who is spending more than $1M/year on back-end compute and AI).
The main ROIs are infrastructure cost savings, latency reductions, improved scalability and reliability, and faster engineering. The cost savings alone can justify a performance team and can help calculate its size, and I'll explore that in depth, but the other ROIs are worth considering and may be more important to a company depending on its stage of growth.
An appropriately-sized performance team should be targeting 5-10% cost savings per year through tuning and product adoptions. (I'll explain appropriate sizes in the When To Hire section.) For many large companies a 5% result would be considered "good" and a 10% would be "great." Achieving this in practice can mean finding large wins (15-80%) on parts of the infrastructure, which become 5-10% overall. Wins are cumulative, so a team hitting 5% savings each year will multiply to become 28% after their 5th year (like compound interest). Even a modest 2% per year will become significant over time. While these compounded numbers can become large, a team needs to continue finding new cost savings each year to justify long-term retention, and should always be focused on the next 5-10%.
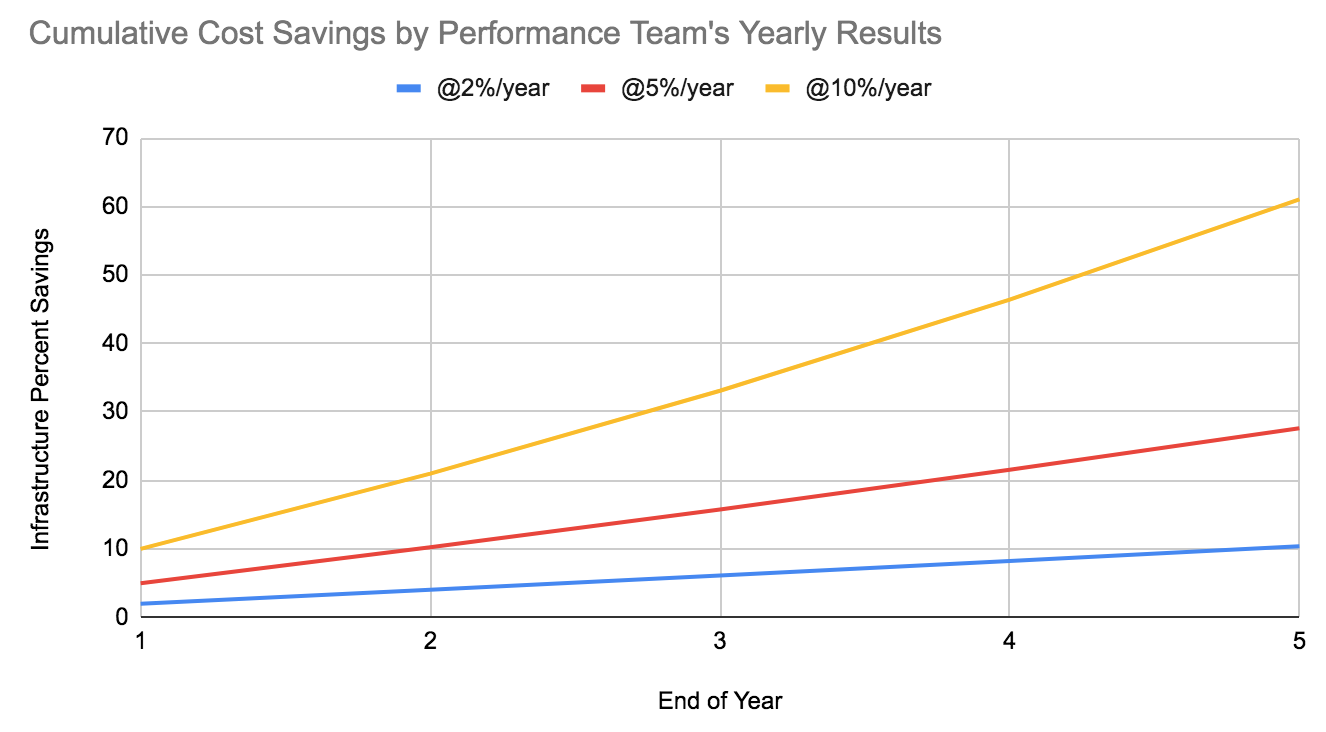
Companies may invest in this work for more than just the cost savings: It can be about developing a competitive advantage in their area by providing a better cost/performance ratio, especially for companies with similar tech-based services that pass costs on to customers.
For sites that haven't employed performance engineers before, there can be enough low-hanging fruit that the team can halve infrastructure costs in their first couple of years (50%). It all depends on the number of staff, their level of expertise, how much perf work other staff are already doing (senior developers, SREs), how much custom code is running, and how complex and volatile the stack is.
It would great if we could publicly share specific results, which would look something like this:
However, these numbers are usually considered financially sensitive as they can reveal company growth, financial health, confidential infrastructure discounts, etc. As a performance engineer I can talk publicly about percent wins on a back-end service, but I usually can't map it to dollar signs. That doesn't help other companies to understand the value of performance engineering. It's not so much of a problem in Silicon Valley, since staff change companies all the time and word spreads about the latest practices in tech. But in far away countries performance engineering doesn't really exist yet, even though there are companies with sufficiently large infrastructure spend.
Continuing the above example, a typical 8% win could be composed of:
With developer/SRE enablement and vendor adoptions, the performance team isn't finding the wins directly but is enabling other teams and vendors to do so. For example, when I worked at Netflix we built and maintained the flame graph "self-service" application, which developers used daily to find wins, and we worked on multiple product adoptions every year. This all needs to be considered as part of the performance team’s ROI.
Reducing the response time or latency of a service is a large part of performance engineering. This involves analyzing average latency, 99th percentile latency, and outlier latency; ensuring latency SLA/SLOs are met; and ensuring acceptable latency during perturbations or peak usage.
Many of the cost optimizations described earlier will also reduce average latency, but latency variance or outliers can remain. For example, a once-every-5-minute system task may have negligible cost and CPU footprint, but it may briefly perturb the application and cause latency outliers. These are debugged differently, often using monitoring, logs, distributed tracing, system-level tracing, packet logs, and custom ad-hoc tools. Sometimes the high latency is caused by the request type itself (the system is fine, but the end-user has requested a slow thing) or is an expected consequence of load (queueing theory, tail latency). Other times it can be from complex interactions across multiple layers of the software stack or from interactions across multiple network endpoints.
While latency is the main consideration to improve end user experience, others include throughput and parallelism.
Systems under load can respond with exponential latency or a cascading failure, causing disruptions or a service outage. Performance engineers can test resource scalability with custom load generators and benchmarks, and use analysis tools to study all parts of the system to find and solve bottlenecks. A performance engineer will not just measure scalability limits, but should also explain what the limiting factors are and how to address them to scale further.
A stable and performant service will also earn trust in your company, and can help you grow customers more quickly. It may be a requirement for satisfying enterprise SLA/SLOs.
Performance engineers can take care of components outside of a developer's code base so the developers can stay focused, and also provide them with a greater performance budget so that they can adopt expensive features earlier. For some early stage companies this ROI may be their most important (and is sometimes called engineering velocity). In detail:
For non-vendor tech companies, in summary:
A. Test, debug, and tune new software and hardware products to find performance improvements, and drives company-wide adoption.
B. Develop in-house performance solutions, such as custom analysis tools, that other teams use to find performance wins.
C. Does deep-dive analysis to identify and reduce workload bottleneck(s) and latency outliers.
D. Optimize software and hardware via tunable parameters and configuration choices.
E. Work with development teams (internal and external) to catch non-scalable solutions early in development, and to suggest or test later performance improvements.
F. Develop proof-of-concept demonstrations of new performance technologies.
G. Develop performance improvements directly for internal and external code.
H. Capacity planning activities: purchase guidance, choosing metrics to monitor, and bottleneck forecasting.
I. Perform knowledge sharing to uplift engineering.
J. Provide in-house expertise to guide purchasing performance solutions.
To elaborate on (A), the testing of new products: Other staff will try a technology by configuring it based on the README, run a load test, and then share the result with management. Some companies hire dedicated staff for this called "performance testers." Performance engineers get more out of the same technology by running analyzers during the test to understand its limiter ("active benchmarking"), and will tune the technology to get an extra 5%, 50%, or more performance. They may also discover that the limiter is an unintended target (e.g., accidentally testing a caching layer instead). Any performance test should be accompanied by an explanation of the limiting factor, since no explanation will reveal the test wasn't analyzed and the result may be bogus. You can simply ask "why is the result not double?".
Day to day, a performance engineer can spend a lot of time fixing broken builds and configuring workloads, because you're the first person testing new patches and bleeding-edge software versions.
What I've described here is for companies that consume tech. For vendors that sell it, performance engineering includes design modeling, analysis of prototype and in-development software and hardware, competitive benchmarking, non-regression testing of new product releases, and pre- and post-sales performance analysis support. (I explain this in more detail in Systems Performance 2nd edition, chapter 1.)
Most companies I've encountered are already doing some kind of performance work scattered across projects and individuals, but they don't yet have a central performance engineering team looking deeply at everything. This leaves their attention spotty, ok in some areas, poor to absent in others. A central performance team looks at everything and prioritizes work based on the potential ROI.
Here are a few rough rules to determine when you should start forming a company-wide performance engineering team and how to size it (see caveats at the end):
That first engineer finds some of the low-hanging fruit, and should be cost effective as your company grows past $1M/year. I'd then consider another performance engineer for every $10M to $20M, and maintain a 3:1 junior:senior ratio. The values you use depend on your performance engineer's skill and the complexity of your environment, and how aggressively you wish to improve performance. At a $20M spend, 5% yearly wins means $1M in savings per staff member (minus their cost); whereas for a $10M spend you'd need to hit 10% wins yearly for $1M in savings.
Consider that as your spend keeps growing you will keep adding more staff, which makes their job harder as there is less low-hanging fruit to find. However, your site will also be growing in scale and complexity, and developing new performance issues for the growing team to solve. Also, smaller percent wins become more impactful at large scale, so I expect such a growing perf team to remain cost effective. (To a point: the largest teams I've seen stop at around 150 staff.)
If you're spending $1M/year on an observability product, you can spend $1M/year on a performance engineering team: e.g., 3 to 4 good staff. If you're only spending $50k/year on an observability product, you can't hire a performance engineer at that price, but you can bring in a consultant or pay for performance training and conference attendance. As I'd expect staff to halve infrastructure costs over time, just the savings on monitoring alone (which typically scale with instance/server count) will pay for the new staff. Because these new engineers are actively reducing infrastructure spend, the total savings are much greater.
I’ve heard some small companies and startups say they spend more money on coffee than they do back-end compute, and don't want to waste limited developer time on negligible cost reductions. However, when a wave of new customers arrive they may hit scalability issues and start losing customers because latency is too high or reliability is too inconsistent. That's usually a good time for small companies to start investing in performance engineering.
Here are some example articles about performance engineering work at non-vendor companies:
I would like to add Bank of America, Wells Fargo, JPMorgan Chase, and CitiGroup to this list since they have many staff with the title "performance engineer" (as you can find on LinkedIn) but it's hard to find public articles about their work. I'd also like a canonical list of central performance engineering teams, but such org chart data can also be hard to find online, and staff don't always call themselves "performance engineers." Other keywords to look out for are: insights, monitoring, and observability; some are just called "support engineers".
Note that there is also a lot of performance engineering done at hardware, software, and cloud vendors (Intel, AMD, NVIDIA, Apple, Microsoft, Google, Amazon, Red Hat, etc.) not listed here, as well as at performance solution companies. In this post I just wanted to focus on non-vendor companies.
I've never seen concrete data on how many people are employed worldwide in performance engineering. Here are my guesses:
It's possible LinkedIn can provide better estimates if you have enterprise access.
There are many reasons to hire a performance engineering team, such as infrastructure cost savings, latency reductions, improved scalability and reliability, and faster engineering. Cost savings alone can justify hiring a team, because a team should be targeting 5-10% cost reductions every year, which over the years adds up to become significantly larger: 28%-61% savings after 5 years.
In this post I explained what performance engineers do and provided some suggested rules on hiring:
Note that you likely already have some senior developers or SREs who are focusing on perf work, reducing the number of new performance engineers you need.
I've met people who would like to work as performance engineers but their employer has no such roles (other than performance testing: not the same thing) despite spending millions per year on infrastructure. I hope this post helps companies understand the value of performance engineering and understand when and how many staff to hire.
Hiring good performance engineers isn't easy as it's a specialized area with a limited talent pool. In part 2 I'll discuss how to hire or train a performance engineering team and provide sample job descriptions and tips, and what to do if you can't hire a performance team.
Thanks for the feedback and suggestions: Vadim Filanovsky (OpenAI), Jason Koch (Netflix), Ambud Sharma (Pinterest), Harshad Sane (Netflix), Ed Hunter, Deirdre Straughan.
Good news! All Microconferences have been accepted and are now accepting submissions. The accepted Microconferences are:
You can start submitting topics to these Microconferences. Remember to read the Blog on what makes the ideal Microconference topic before submitting.
After that, submit your topic and make sure that you select the appropriate track that you are submitting for (they are all listed under LPC Microconference Proposals and end with MC).
One of my pet peeves around running local LLMs and inferencing is the sheer mountain of shit^W^W^W complexity of compute stacks needed to run any of this stuff in an mostly optimal way on a piece of hardware.
CUDA, ROCm, and Intel oneAPI all to my mind scream over-engineering on a massive scale at least for a single task like inferencing. The combination of closed source, over the wall open source, and open source that is insurmountable for anyone to support or fix outside the vendor, screams that there has to be a simpler way. Combine that with the pytorch ecosystem and insanity of deploying python and I get a bit unstuck.
What can be done about it?
llama.cpp to me seems like the best answer to the problem at present, (a rust version would be a personal preference, but can't have everything). I like how ramalama wraps llama.cpp to provide a sane container interface, but I'd like to eventually get to the point where container complexity for a GPU compute stack isn't really needed except for exceptional cases.
On the compute stack side, Vulkan exposes most features of GPU hardware in a possibly suboptimal way, but with extensions all can be forgiven. Jeff Bolz from NVIDIA's talk at Vulkanised 2025 started to give me hope that maybe the dream was possible.
The main issue I have is Jeff is writing driver code for the NVIDIA proprietary vulkan driver which reduces complexity but doesn't solve my open source problem.
Enter NVK, the open source driver for NVIDIA GPUs. Karol Herbst and myself are taking a look at closing the feature gap with the proprietary one. For mesa 25.2 the initial support for VK_KHR_cooperative_matrix was landed, along with some optimisations, but there is a bunch of work to get VK_NV_cooperative_matrix2 and a truckload of compiler optimisations to catch up with NVIDIA.
But since mesa 25.2 was coming soon I wanted to try and get some baseline figures out.
I benchmarked on two systems (because my AMD 7900XT wouldn't fit in the case). Both Ryzen CPUs. The first I used system I put in an RTX5080 then a RTX6000 Ada and then the Intel A770. The second I used for the RX7900XT. The Intel SYCL stack failed to launch unfortunately inside ramalama and I hacked llama.cpp to use the A770 MMA accelerators.
ramalama bench hf://unsloth/Qwen3-8B-GGUF:UD-Q4_K_XL
I picked this model at random, and I've no idea if it was a good idea.


The token generation workload is a lot less matmul heavy than prompt processing, it also does a lot more synchronising. Jeff has stated CUDA wins here mostly due to CUDA graphs and most of the work needed is operation fusion on the llama.cpp side. Prompt processing is a lot more matmul heavy, extensions like NV_coopmat2 will help with that (NVIDIA vulkan already uses it in the above), but there may be further work to help close the CUDA gap. On AMD radv (open source) Vulkan is already better at TG than ROCm, but behind in prompt processing. Again coopmat2 like extensions should help close the gap there.
NVK is starting from a fair way behind, we just pushed support for the most basic coopmat extension and we know there is a long way to go, but I think most of it is achievable as we move forward and I hope to update with new scores on a semi regular basis. We also know we can definitely close the gap on the NVIDIA proprietary Vulkan driver if we apply enough elbow grease and register allocation :-)
I think it might also be worth putting some effort into radv coopmat2 support, I think if radv could overtake ROCm for both of these it would remove a large piece of complexity from the basic users stack.
As for Intel I've no real idea, I hope to get their SYCL implementation up and running, and maybe I should try and get my hands on a B580 card as a better baseline. When I had SYCL running once before I kinda remember it being 2-4x the vulkan driver, but there's been development on both sides.
(The graphs were generated by Gemini.)
I'm unemployed right now and I go to job interviews once in a while. One time, the company was doing another AI thing, having to do with verifying that training computations were doing something useful, and not just "dumping a stream of floating point numbers".
Until now I didn't think of it, but apparently AI is all in FP. And it reminded me how I worked in a CPU design place, where they had a group focused on FP. Those guys were doing FP since the days of transistor. They migrated their designs, generation by generation, through TTL, ECL, Bi-CMOS, CMOS. When I heard from them last, they were tinkering with "deep sub-micron".
One remarkable part about their thing was that because they started out in transistors, their FPU didn't have any microcode. It was all in hardware. Even divisions! Just a bunch of counters that sequenced whatever necessary.
For a long time during the reign of x86, the group was somewhat de-prioritized, because many microprocessors at the time treated FP performance as an afterthought. A number of desktop CPUs shipped with no hardware FP at all. But look how the tables have turned. I honestly hope that it was not too late and AI has become a boon for the successors of my past colleagues.
On the topic of AI writing code, I've read a Sci-Fi story some 30 years ago, probably from the 1950s or 1960s.
At the future Earth, fiction writers write using machines. The quality of writing is associated with the sophistication of writer's machine. Publishers reject stories written on a lower end machine. The hero of the story is a struggling writer, who has to make do with a cheap unit. As his machine writes poorly, he's paid little, so he cannot save up for an upgrade. He hatches a plan to sneak into the house of a successful writer, and use the better machine to write a break-out story. The oddly prescient punch-line is, he discovers that the successful writer's machine was non-functional. His better wrote his stories manually in secret.
I wonder if such scenario may even be possible, programming-wise, if you work in a company that does not micro-manage velocity, or work as a consultant, so that your sausage factory remains behind a curtain.
The independent security researcher Adam Gowdiak has published an extensive report on flaws he found in some eUICCs (the chips used to store eSIM profiles within the GSMA eSIM architecture). While the specific demonstrable exploit was in a product of one specific CardOS Vendor (Kigen, formerly part of ARM), the fundamental underlying issue is actually an architectural one.
The Oracle Javacard [memory] safety architecture relies on a so-called bytecode verifier which is a program that you run after compiling an application, but before executing the code on the Javacard. The specifications allow for both on-card and off-card verification. However, the computational complexity of this verifier is generally assumed to exceed the resources available inside many microcontrollers used to implement java cards. Such microcontrollers often are ARM SC000 (Cortex-M0 based) or SC300 (Cortex-M3 based) based, with only tens of kilobytes of RAM and hundreds of kilobytes of flash.
Javacard was originally developed for use cases within the banking/payment industry. In that industry, the card-issuing bank is the sole entity that has the keys to load java applets onto a card. That entity is of course interested in the security of the card, and will hence always run an off-card bytecode verifier. In a world of physical SIM/USIM cards issued by a single mobile operator, the situation is the same: The card-issuing MNO/MVNO is the only entity with key materials to install additional java applets on the card.
This fundamental problem became already apparent by earlier findings by Adam Gowdiak in 2019, but at least in terms of public responses by Oracle and Gemalto back then, they mostly did hand-waving and/or made lame excuses.
However, when the industry represented in GSMA standardized the eSIM architecture, this changed. Suddenly we have various eSIM profiles of various different operators, each holding key material to install Java applets on the shared card. In such an environment, it is no longer safe to assume that every MNO/MVNO can be trusted to be non-adverserial and hence trusted to run that off-card bytecode verifier before loading applets onto the card.
If the Javacard runtime on the existing card/chip itself cannot autonomously perform those verification tasks, I don't see how the problem can ever be solved short of completely removing/disabling Javacard support in such eUICCs. Luckily it is an optional feature and not a mandatory requirement for an eUICC to be approved/accredited. Sadly many MNOs/MVNOS however will mandate Javacard support in their eSIM profiles and hence refuse to install into an eUICC without it :(
In my opinion, the solution to the problem can only be to either make the GSMA require full on-card bytecode verification on all eUICCs, or to remove Javacard support from the eUICC.
We have to keep in mind that there are hundreds if not thousands of MVNOs around the planet, and all of them are subject to whatever local jurisdiction they operate in, and also subject to whatever government pressure (e.g from intelligence agencies).
In hindsight, anyone familiar with the 2019 work by Gowdiak and an understanding of the fundamental change to multiple stakeholders in an eUICC (compared to classic SIM/USIM) should have arrived at the conclusion that there is a serious problem that needs addressing. I think the 2019 work had not been publicized and covered significantly enough to make sure that everyone in the industry was made aware of the problems. And that in turn is mostly a result of Oracle + Gemalto downplaying the 2019 findings back in the day, rather than raising awareness within all relevant groups and bodies of the industry.
The specific attack presented was using a GSMA TS.48 test profile to install the malicious java bytecode; those TS.48 profiles are standardized profiles used by the industry for cellular testing; until the attack they contained well-known static OTA key material. The mitigation to randomize/diversity those keys in TS.48v7 closes that particular vector, but the attack itself is not dependent on test profiles. Any MNO/NVNO (or rather, anyone with access to a commercial service of a SM-DP+ accredited by GSMA) obviously has the ability to load java applets into the eSIM profile that they create, using keys that they themselves specify.
Oracle should get off their we only provide a reference implementation and vendors should invent their own prporietary verification mechanisms horse. This is just covering their own ass and not helping any of their downstream users/implementers. The reference implementation should show how proper verification can be done in the most resource-constrained environment of cards (it's JavaCard, after all!), and any advances of the verifier should happen once at Oracle, and then used by all the implementers (CardOS vendors). Anyone who really cares about security of a standardized platform (like Javacard) should never leave key aspects of it up to each and every implementer, but rather should solve the problem once, publicly, with validation and testing tools, independent 3rd party penetration testing and then ensure that every implementer uses that proven implementation.
GSMA should have security requirements (and mandatory penetration tests) specifically regarding the JVM/JRE of each card that gets SAS-UP accredited.
GSMA should require that Javacard support should be disabled on all existing eUICCs that cannot legitimately claim/demonstrate that they are performing full bytecode verification entirely on-card.
GSMA should refuse any future SAS-UP accreditation to any product that requires off-card bytecode verification
The entire industry should find a way to think beyond Javacard, or in fact any technology whose security requires verification of the executable program that is too complex to perform on-card on the targeted microcontrollers.
I’m not blogging much these days, and more likely posting on these accounts:
If you’d like to follow updates for the Linux Security Summit (LSS), see here:
For topics which are specifically $work related, see my LinkedIn:
Blog posts are like buses sometimes...
I've spent time over the last month enabling Blackwell support on NVK, the Mesa vulkan driver for NVIDIA GPUs. Faith from Collabora, the NVK maintainer has cleaned up and merged all the major pieces of this work and landed them into mesa this week. Mesa 25.2 should ship with a functioning NVK on blackwell. The code currently in mesa main passes all tests in the Vulkan CTS.
Quick summary of the major fun points:
Ben @ NVIDIA had done the initial kernel bringup in to r570 firmware in the nouveau driver. I worked with Ben on solidifying that work and ironing out a bunch of memory leaks and regressions that snuck in.
Once the kernel was stable, there were a number of differences between Ada and Blackwell that needed to be resolved. Thanks to Faith, Mel and Mohamed for their help, and NVIDIA for providing headers and other info.
I did most of the work on a GB203 laptop and a desktop 5080.
1. Instruction encoding: a bunch of instructions changed how they were encoded. Mel helped sort out most of those early on.
2. Compute/QMD: the QMD which is used to launch compute shaders, has a new encoding. NVIDIA released the official QMD headers which made this easier in the end.
3. Texture headers: texture headers were encoded different from Hopper on, so we had to use new NVIDIA headers to encode those properly
4. Depth/Stencil: NVIDIA added support for separate d/s planes and this also has some knock on effects on surface layouts.
5. Surface layout changes. NVIDIA attaches a memory kind to memory allocations, due to changes in Blackwell, they now use a generic kind for all allocations. You now longer know the internal bpp dependent layout of the surfaces. This means changes to the dma-copy engine to provide that info. This means we have some modifier changes to cook with NVIDIA over the next few weeks at least for 8/16 bpp surfaces. Mohamed helped get this work and host image copy support done.
6. One thing we haven't merged is bound texture support. Currently blackwell is using bindless textures which might be a little slower. Due to changes in the texture instruction encoding, you have to load texture handles to intermediate uniform registers before using them as bound handles. This causes a lot of fun with flow control and when you can spill uniform registers. I've written a few efforts at using bound textures, so we understand how to use them, just have some compiler issues to maybe get it across the line.
7. Proper instruction scheduling isn't landed yet. I have a spreadsheet with all the figures, and I started typing, so will try and get that into an MR before I take some holidays.
I should have mentioned this here a week ago. The Vulkan AV1 encode extension has been out for a while, and I'd done the initial work on enabling it with radv on AMD GPUs. I then left it in a branch, which Benjamin from AMD picked up and fixed a bunch of bugs, and then we both got distracted. I realised when doing VP9 that it hasn't landed, so did a bit of cleanup. Then David from AMD picked it up and carried it over the last mile and it got merged last week.
So radv on supported hw now supports all vulkan decode/encode formats currently available.
The Vulkan WG has released VK_KHR_video_decode_vp9. I did initial work on a Mesa extensions for this a good while back, and I've updated the radv code with help from AMD and Igalia to the final specification.
There is an open MR[1] for radv to add support for vp9 decoding on navi10+ with the latest firmware images in linux-firmware. It is currently passing all VK-GL-CTS tests for VP9 decode.
Adding this decode extension is a big milestone for me as I think it now covers all the reasons I originally got involved in Vulkan Video as signed off, there is still lots to do and I'll stay involved, but it's been great to see the contributions from others and how there is a bit of Vulkan Video community upstream in Mesa.
[1] https://gitlab.freedesktop.org/mesa/mesa/-/merge_requests/35398
In the last 3 years I've attended 77 meetings that began between 1am and 6am, roughly once every two weeks, followed by my usual 7am start, Monday to Saturday. I'm working remotely from Australia for a US firm (Intel) who does not have a local office here. I'm not complaining. I work weird hours, but I don't think I work too many. I'm writing this post because there are some misconceptions and assumptions about the lives of remote workers, and I thought I'd share my own details as an anecdote, along with some tips for others in a similar situation (US job from Asia).
Most early meetings were 1 hour, but some were longer, for a total of 102 hours awake. As a histogram:
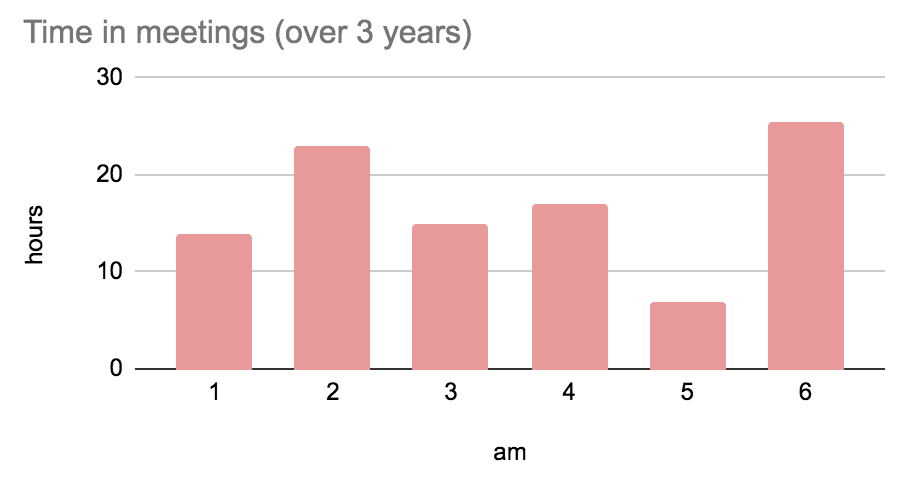
I've never been a morning person, but I can manage a 7am start. What about a 2am meeting? Also doable. They sound ok in isolation, but consider that every 2-3am is followed by a 7am start, which means a 6:30am alarm after going back to sleep at 3:30am, if you're lucky. It's not easy working this timezone difference, and I'd guess others have it even worse than I do (more meetings).
Like other remote staff I work with, I have a dedicated office at home where I can close the door and work uninterrupted for hours (it's changed quite a bit since it was filmed in the eBPF documentary):

That's a Samson Meteor mic on a desktop suspension boom, and I have another suspension boom clamped onto a bookcase holding a Logitech BRIO camera (when I had it sitting on my monitor it'd shake as I typed). It's important to have the best sound and video when that's how you're interacting with people all day.
Miscellaneous notes and tips about remote work:
Count out-of-hours meetings. Sometimes people hesitate to book me at 2am, when there's no other time that would work, and it takes a few emails to convince them that it's ok. I've found it saves time to log these meetings, count them, and share stats: "I've had 76 meetings between 1am and 6am, if you need to add another, that's ok, it'll be my 77th."
Never complain about the hours. There may be someone in management who doesn't support remote work, who could use such complains to argue against it. Sometimes, when I'm searching to find the right words to say at 4-something-am, I've confessed that I'm a bit tired, but I really try to never mention it.
Staying motivated. I found keeping a daily log of what I accomplished works best (I've done this for over a decade). If one day my entry looks soft, I try to do more on the next. I summarize each week for my manager.
People assume it's a problem when it isn't. Brendan didn't accept the meeting, oh, it's because it's 2am for him and he'll be asleep. Wrong! It's because I have a clash with another 2am meeting. I try to communicate this with the meeting host, but there can be others in the meeting that don't get the message, and they never consider this possibility. If I were back in California I'd still miss the meeting, but people would assume it's due to a clash. Here, they assume I'm asleep and not making the effort, when in fact I am. It means people are assuming that remote work is a problem when it isn't.
Some meetings get cancelled or silently recorded. The 77 count I mentioned earlier doesn't include the several meetings that were cancelled at the last minute, but I woke up for anyway, or those that weren't supposed to be recorded but I woke up to find they were. If you have remote staff, please try to cancel meetings before they go to bed, and be clear on which meetings are recorded for later viewing.
Upset stomaches. One early meeting every two weeks doesn't sound too bad. The worst problem is that it can leave me with an upset stomach that can last for days. I'm still working fine, it's just uncomfortable. I don't know if other people suffer this or why it happens. Maybe it's just the extra coffee.
Fewer sick days. I don't normally take many sick days, so I can't say my data is very significant. FWIW: In my last in-person job I averaged 1.5 sick days/year (9 in 6 years), and now it's 0.33 (1 in 3 years).
Northen/Southern hemisphere times get weird. Daylight savings moves in different directions and on different dates, so from Sydney depending on the time of year I have 3, 4, or 5 hours of overlap with 9-5pm on the US west coast. To make it easy for people I setup my calendar with my work hours highlighted.
Saturday? Saturday morning is Friday afternoon in the US. For a while I tried working Tuesday to Saturday, but it's better for family time if I finish early on Saturday (at US 5pm) and work Monday to make up the difference.
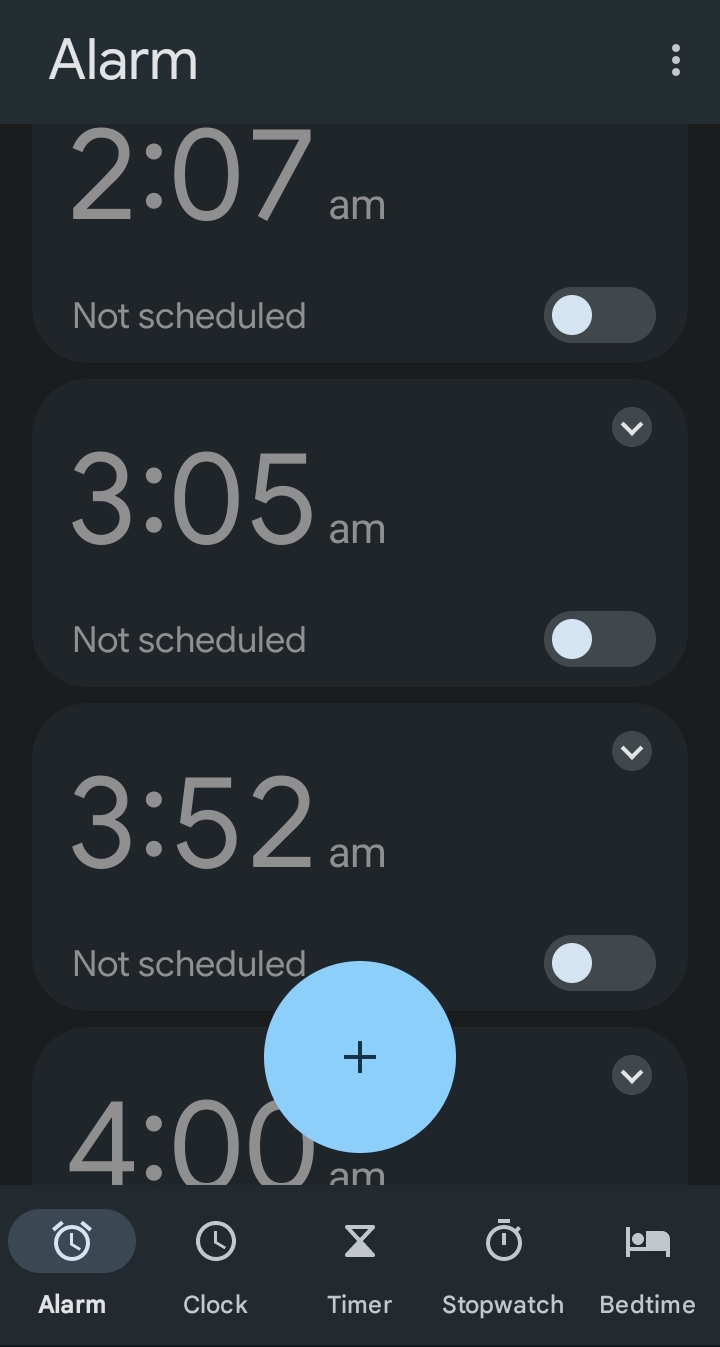
Career limiting I've experienced it to be career limiting, and I've heard the saying "out of sight, out of mind." Opportunities can be given to local workers despite the remote worker being more qualified, or even number one in the world in that area. The remote worker is then expected to teach the local worker in weekly or monthly meetings. It's not enough time and there's a power imbalance: the local worker is in charge and doesn't have to listen. This reduces company competitiveness. It's also fixable: try giving remote workers the chance they are best qualified to do.
Compared to office work. It depends on the job and meeting load. In my last years as an in-person office worker I was on a team where we typically worked solo on different projects, with headphones on, and primarily communicated over chatrooms with few in-person meetings. The only regular time we had human interaction was lunch. Remote work has not been a big difference to that kind of job: similar work, similar chatrooms. (The thing I miss the most about the office is playing cricket with other staff after work.) It wouldn't make a big difference to my current job either, as the people I work with are scattered. The one thing it would solve is "out of sight" problem, but that's not the only way to solve it.
Remote work success stories. Linux development is a great example of engineers around the world working together. Note that Linux engineers do try to meet at least once a year at one of the Linux conferences, something remote office workers can do as well at company get-togethers. My books are another example: they are out-of-hours projects where I worked with the reviewers online, some of whom I still haven't met. And the world's first AI Flame Graphs is the work of a fully-remote team.
I was in a video meeting recently with US staff where I mentioned the "77 meetings between 1 and 6am" statistic, and I could see the look of shock in their faces. Did they assume I was just working 9-5 and not making an effort to accommodate other timezones? I know some companies are discussing ending remote-work: are the deciders also making such assumptions about the lives of remote workers? It may not do much, but I can at least share my own details here as an example anecdote.
Update: Some comments about this post have pointed out that these hours can be unhealthy and shouldn't be encouraged, and I don't disagree. I hope to have fewer early meetings in the years ahead, myself. This post is just to show that remote workers can be more accomodating than people may assume, and I hope that's taken into consideration when changing remote work policies.
When some people hear I'm working from Australia, they may think of beaches and surfboards and sunny vacations, but my reality is a full time job across weird hours, lots of coffee, and being overlooked for opportunities. That said, every job has its pros and cons, and I'm still grateful that some companies make fully remote work an option.
Submissions for the Refereed Track and Microconferences are now open. Linux Plumbers will be held this year in Tokyo from December 11th – 13th (Note, the 13th is on a Saturday).
The Refereed presentations are 45 minutes in length and should focus on a specific aspect of the “plumbing” in a Linux ecosystem. Examples of Linux plumbing include core kernel subsystems, init systems, core libraries, toolchains, windowing systems, management tools, device support, media creation/playback, testing, and so on. The best presentations are not about finished work, but rather problem statements, proposals, or proof-of-concept solutions that require face-to-face discussions and debate.
The Microconferences are 3 and a half hours of technical discussion, broken up into 15 to 30 minute subtopics. The only presentations allowed are those that are needed to bring the audience up to speed and should not last more than half the allotted time for the subtopic. To submit a Microconference, provide a topic, some examples of subtopics to be discussed and a list of key people that should be present to have meaningful discussions. For Microconferences that have been to Linux Plumbers in the past, they should provide a list of accomplishments that were a direct result of the discussions from their previous sessions (with links to patches and such).
Presentations and Microconference subtopic leads should ideally be physically present at the conference. Remote presentations may be available but are strongly discouraged.
The Refereed submissions end at 11:59PM UTC on Wednesday, September 10, 2025.
The Microconference submissions end at 11:59PM UTC on Sunday, June 29, 2025.
Go ahead and submit your Refereed track presentation or Microconference topic. We are looking forward to seeing the great content that is submitted that makes Linux Plumbers the best technical conference there is.
AI Flame Graphs are now open source and include Intel Battlemage GPU support, which means it can also generate full-stack GPU flame graphs for providing new insights into gaming performance, especially when coupled with FlameScope (an older open source project of mine). Here's an example of GZDoom, and I'll start with flame scopes for both CPU and GPU utilization, with details annotated:
(Here are the raw CPU and GPU versions.) FlameScope shows a subsecond-offset heatmap of profile samples, where each column is one second (in this example, made up of 50 x 20ms blocks) and the color depth represents the number of samples, revealing variance and perturbation that you can select to generate a flame graph just for that time range. Update: the row size can be ajusted (it is limited by the sample rate captured in the profile), e.g., you could generate 60 rows to match 60fps games.
Putting these CPU and GPU flame scopes side by side has enabled your eyes to do pattern matching to solve what would otherwise be a time-consuming task of performance correlation. The gaps in the GPU flame scope on the right – where the GPU was not doing much work – match the heavier periods of CPU work on the left.
FlameScope lets us click on the interesting periods. By selecting one of the CPU shader compilation stripes we get the flame graph just for that range:
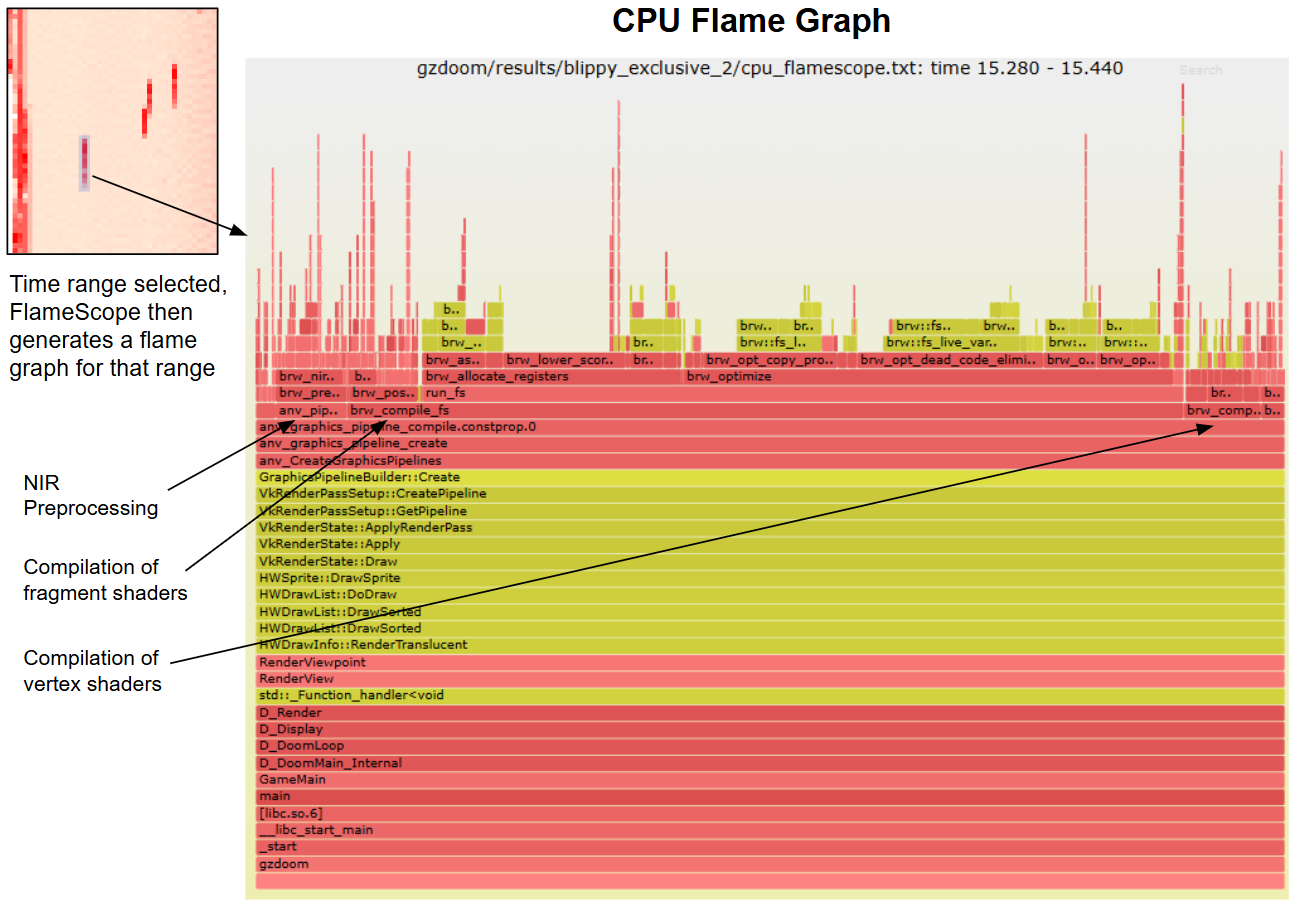
This is brilliant, and we can see exactly why the CPUs were busy for about 180 ms (the vertical length of the red stripe): it's doing compilation of GPU shaders and some NIR preprocessing (optimizations to the NIR intermediate representation that Mesa uses internally). If you are new to flame graphs, you look for the widest towers and optimize them first. Here is the interactive SVG.
CPU flame graphs and CPU flame scope aren't new (from 2011 and 2018, both open source). What is new is full-stack GPU flame graphs and GPU flame scope.
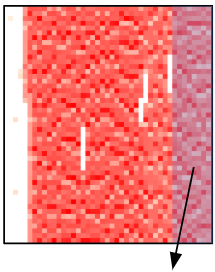
Interesting details can also be selected in the GPU FlameScope for generating GPU flame graphs. This example selects the "room 3" range, which is a room in the Doom map that contains hundreds of enemies. The green frames are the actual instructions running on the GPU, aqua shows the source for these functions, and red (C) and yellow (C++) show the CPU code paths that initiated the GPU programs. The gray "-" frames just help highlight the boundary between CPU and GPU code. (This is similar to what I described in the AI flame graphs post, which included extra frames for kernel code.) The x-axis is proportional to cost, so you look for the widest things and find ways to reduce them.


I've included the interactive SVG version of this flame graph so you can mouse-over elements and click to zoom. (PNG version.)
The GPU flame graph is split between stalls coming from rendering walls (41.4%), postprocessing effects (35.7%), stenciling (17.2%), and sprites (4.95%). The CPU stacks are further differentiated by the individual shaders that are causing stalls, along with the reasons for those stalls.
We picked GZDoom to try since it's an open source version of a well known game that runs on Linux (our profiler does not support Windows yet). Intel Battlemage makes light work of GZDoom, however, and since the GPU profile is stall-based we weren't getting many samples. We could have switched to a more modern and GPU-demanding game, but didn't have any great open source ideas, so I figured we'd just make GZDoom more demanding. We built GPU demanding maps for GZDoom (I can't believe I have found a work-related reason to be using Slade), and also set some Battlemage tunables to limit resources, magnifying the utilization of remaining resources.

Our GZDoom test map has three rooms: room 1 is empty, room 2 is filled with torches, and room 3 is open with a large skybox and filled with enemies, including spawnpoints for Sergeants. This gave us a few different workloads to examine by walking between the rooms.
The AI Flame Graph project is pioneering work, and has needed various changes to graphics compilers, libraries, and kernel drivers, not just the code but also how they are built. Since Intel has its own public cloud (the Intel® Tiber™ AI Cloud) we can fix the software stack in advance so that for customers it "just works." Check the available releases. It currently supports the Intel Max Series GPU.
If you aren't on the Intel cloud, or you wish to try this with Intel Battlemage, then it can require a lot of work to get the system ready to be profiled. Requirements include:
If you are new to custom kernel builds and library tinkering, then getting this all working may feel like Nightmare! difficulty. Over time things will improve and gradually get easier: check the github docs. Intel can also develop a much easier version of this tool as part of a broader product offering and get it working on more than just Linux and Battlemage (either watch this space or, if you have an Intel rep, ask them to make it a priority).
Once you have it all working, you can run the iaprof command to profile the GPU. E.g.:
git clone --recursive https://github.com/intel/iaprof cd iaprof make deps make sudo iaprof record > profile.txt cat profile.txt | iaprof flame > flame.svg
iaprof is modeled on the Linux perf command. (Maybe one day it'll become included in perf directly.) Thanks to Gabriel Muñoz for getting the work done to get this open sourced.
From the launch of AI flame graphs last year, I can guess what FAQ #1 will be: “What about NVIDIA?”. They do have flame graphs in Nsight Graphics for GPU workloads, although their flame graphs are currently shallow as it is GPU code only, and onerous to use as I believe it requires an interposer; on the plus side they have click-to-source. The new GPU profiling method we've been developing allows for easy, everything, anytime profiling, like you expect from CPU profilers.
Future work will include github releases, more hardware support, and overhead reduction. We're the first to use eustalls in this way, and we need to add more optimization to reach our target of <5% overhead, especially with the i915 driver.
We've open sourced AI flame graphs and tested it on new hardware, Intel Battlemage, and a non-AI workload: GZDoom (gaming). It's great to see a view of both CPU and GPU resources down to millisecond resolution, where we can see visual patterns in the flame scope heat maps that can be selected to produce flame graphs to show the code. We applied these new tools to GZDoom and explained GPU pauses by selecting the corresponding CPU burst and reading the flame graph, as well as GPU code use for arbitrary time windows.
While we have open sourced this, getting it all running requires Intel hardware and Linux kernel and library tinkering – which can be a lot of work. (Actually playing Doom on Nightmare! difficulty may be easier.) This will get better over time. We look forward to seeing if anyone can fight their way through this work in the meantime and what new performance issues they can solve.
Authors: Brendan Gregg, Ben Olson, Brandon Kammerdiener, Gabriel Muñoz.
This is an esoteric topic that might be of interest to people implementing Intel hypervisors. It assumes you know the basics of the Intel virtualization architecture, see Hypervisor from scratch for a tutorial. The actual full VT architecture is described in Volume 3 of the Intel SDM
Let’s say we write an x86 hypervisor that starts in the UEFI environment and virtualizes the initialization phase of an OS. But the hypervisor wants to eventually quit itself to not cause extra overhead during OS run time.
The way the hypervisor works is that it runs in its own memory and with its own page tables which are switched atomically on every VM exit by the VT-x implementation. This way it is isolated from the main OS.
At some vm exit with the hypervisor running in its own context it decides that it is not needed anymore and wants to quit. To disable VT support the VMXOFF instruction can be used. But what we really need is an atomic VMXOFF + switch to the original OS page tables plus a jump, and all that without using any registers which need to be already restored to the original state of the OS.
One trick is to use the MOV to CR3 instruction that reloads the page table as a jump. As soon as the page table is reloaded the CPU will fetch the next instruction with the translations from the freshly loaded page table, so we can transfer execution to the guest context. However to do that the MOV CR3 needs to be located just before the page offset of the target instruction. This can be done by copying a trampoline to the right page offset (potentially overlapping into the previous page). The trampoline is located in a special transfer page table mapping that places writable code pages overlapping the target mapping.
But there are some complications. The hypervisor also needs to load the segmentation state (like GDT/LDT/IDT) of the guest. In theory they could just be loaded by mapping these guest pages into the transfer mapping and loading them before the transfer. But what happens if the GDT/LDT/IDT is on the same page as the target address? This is common in real OS’ assembler startup code which is implemented in a small assembler file without any page separation between code and data. One option would be to copy them to the transfer page too and load it there, or the hypervisor first copies them to a temporary buffer and loads it from there. In the second option the base addresses of these structures will be incorrect, but in practice you can often rely on them getting reloaded eventually anyways.
Another problem is the register state of the target. MOV to CR3 needs a register as the source of the reload, and it needs to be the last instruction of the trampoline. So it is impossible to restore the register it uses. But remember the hypervisor is doing this as the result of a VM exit. If we chose an exit for a condition that already clobbers a register we can use the same register for the reload and the next instruction executed in the original target (and which caused the exit originally) will just overwrite it again.
A very convenient instruction for this is CPUID. It is executed multiple times in OS startup and overwrites multiple registers. In fact VMX always intercepts CPUID so it has to handle these exits in any case. So the trick to quit an hypervisor is to wait for the next CPUID exit and then use one of the registers clobbered by CPUID for the final CR3 reload. This will have inconsistent register state for one instruction in the target, but unless the original OS is currently running a debugger it will never notice. In principle any exit as a result of an instruction that clobbers a register can be used for this.
There is another potential complication if the target address of the OS conflicts with where the hypervisor is running before entering the transfer mapping. The transfer mapping needs to map the original code so that it can be jumped to. This could be solved with a third auxiliary mapping that is used before jumping to the transfer trampoline. In practice it doesn’t seem to be a problem because x86 OS typically run in a 1:1 mapping for startup, and that cannot conflict with the 1:1 mapping used by UEFI programs as our hypervisor.
Happy hypervisor hacking!
One new feature in kmod 34
is related to lazily loading the decompression libraries. In other words,
dlopen them when/if they are needed. Although it’s desired for a tool like
modinfo to be able to inspect a .ko.xz, .ko.zst or .ko.gz module, other
daemons linking to libkmod would benefit from never loading them. This is the
case for systemd-udevd that will load the kernel modules during boot when they
are requested by the kernel.
Testing on Archlinux, it goes from this:
$ cat /proc/$(pidof systemd-udevd)/maps | grep -e libz -e liblzma
7f27a9ae8000-7f27a9aeb000 r--p 00000000 00:19 15656 /usr/lib/liblzma.so.5.6.4
7f27a9aeb000-7f27a9b0e000 r-xp 00003000 00:19 15656 /usr/lib/liblzma.so.5.6.4
7f27a9b0e000-7f27a9b19000 r--p 00026000 00:19 15656 /usr/lib/liblzma.so.5.6.4
7f27a9b19000-7f27a9b1a000 r--p 00031000 00:19 15656 /usr/lib/liblzma.so.5.6.4
7f27a9b1a000-7f27a9b1b000 rw-p 00032000 00:19 15656 /usr/lib/liblzma.so.5.6.4
7f27a9b1b000-7f27a9b27000 r--p 00000000 00:19 15985 /usr/lib/libzstd.so.1.5.7
7f27a9b27000-7f27a9bed000 r-xp 0000c000 00:19 15985 /usr/lib/libzstd.so.1.5.7
7f27a9bed000-7f27a9bfe000 r--p 000d2000 00:19 15985 /usr/lib/libzstd.so.1.5.7
7f27a9bfe000-7f27a9bff000 r--p 000e3000 00:19 15985 /usr/lib/libzstd.so.1.5.7
7f27a9bff000-7f27a9c00000 rw-p 000e4000 00:19 15985 /usr/lib/libzstd.so.1.5.7
7f27aa892000-7f27aa895000 r--p 00000000 00:19 7852 /usr/lib/libz.so.1.3.1
7f27aa895000-7f27aa8a3000 r-xp 00003000 00:19 7852 /usr/lib/libz.so.1.3.1
7f27aa8a3000-7f27aa8a9000 r--p 00011000 00:19 7852 /usr/lib/libz.so.1.3.1
7f27aa8a9000-7f27aa8aa000 r--p 00017000 00:19 7852 /usr/lib/libz.so.1.3.1
7f27aa8aa000-7f27aa8ab000 rw-p 00018000 00:19 7852 /usr/lib/libz.so.1.3.1
$
to this:
$ cat /proc/$(pidof systemd-udevd)/maps | grep -e libz -e liblzma
$
… even if all modules in Archlinux are zstd-compressed.
systemd itself started doing this a few releases ago and published https://systemd.io/ELF_PACKAGE_METADATA/. That spec is also used for this new support in kmod to annotate what libraries are possibly dlopen’ed. However although it prevented libkmod from being loaded in other binaries, it didn’t prevent all these decompression libraries from being mapped in systemd-udevd since it uses libkmod.
One might wonder why not even libzstd.so is mapped. That’s because when
loading the modules and the kernel supports decompressing that format, libkmod
just skips any decompression: it opens the file and passes the descriptor
to the Linux kernel via finit_module.
/sys/module/compression shows what algorithm the Linux kernel can use for
module decompression.
In kmod 34 all that is needed is to setup the build with -Ddlopen=all.
More fine-grained options are also supported, allowing to specify individual
libraries to dlopen. It may go away in a future release if distros just choose
an all-or-nothing support.
I'm looking for a name for a new WiFi area.
The current one is called "Tokyo-Jupiter". It turns out hard to top, it meets all the requirements. It's a geographic area. It's weeb, but from old enough times: not Naruto Shippuuden, Attack On Titan, or Kimetsu no Yaiba. Classy and unique enough.
"Konoha" is too new, too washed-up, and too short.
"Kodena" and "Yokosuka" add a patriotic American tint nicely, but also too short.
"Minas-Tirith" is a place and outstanding in its reference, but not weeb.
"Big-Sight" is an opposite of the above: too much. I'm a weeb, not otaku.
Any ideas are appreciated.
UPDATE 2025-01-11: The provisional candidate is "Nishi-Teppelin". Don't google it, it's not canon. I remain open to better ideas.
UPDATE 2025-02-20: Ended with "Ostrov-Krym" after all.
We all know how it's possible for a guest VM to access various host functions by accessing a PCI device, right? When KVM traps an access to this fake PCI, QEMU emulates the device, which allows packets sent, console updated, or whatever. This is called "virtio".
NVIDIA took it a step further: they have a real PCI device that emuilates QEMU. No joke. And, they have a firmware bug! The following patch works around it:
diff --git a/drivers/virtio/virtio_pci_modern.c b/drivers/virtio/virtio_pci_modern.c
index 9193c30d640a..6bbb34f9b088 100644
--- a/drivers/virtio/virtio_pci_modern.c
+++ b/drivers/virtio/virtio_pci_modern.c
@@ -438,6 +438,7 @@ static void vp_reset(struct virtio_device *vdev)
{
struct virtio_pci_device *vp_dev = to_vp_device(vdev);
struct virtio_pci_modern_device *mdev = &vp_dev->mdev;
+ int i;
/* 0 status means a reset. */
vp_modern_set_status(mdev, 0);
@@ -446,8 +447,16 @@ static void vp_reset(struct virtio_device *vdev)
* This will flush out the status write, and flush in device writes,
* including MSI-X interrupts, if any.
*/
- while (vp_modern_get_status(mdev))
+ i = 0;
+ while (vp_modern_get_status(mdev)) {
+ if (++i >= 10000) {
+ printk(KERN_INFO
+ "virtio reset ignoring status 0x%02x\n",
+ vp_modern_get_status(mdev));
+ break;
+ }
msleep(1);
+ }
vp_modern_avq_cleanup(vdev);
I'm not dumping on NVIDIA here at all, I think it's awesome for this devious hardware to exist. And bugs are just a way of life.
They pushed the "You're one of a few experts invited to answer" notifications for a long time - maybe a year, I don't remember. When I had enough and started to capture them with the intent of mockery, they stopped. So sad. Here's what I got:
"You're facing pushback from vendors on cloud integration. How can you convince them to collaborate?"
"You're focused on cutting costs in cloud computing. How do you ensure security protocols aren't compromised?"
"You're overseeing a code review process. How do you ensure feedback boosts developer morale?"
What a dystopia. LinkedIn is owned by Microsoft, so I'm not suprised someone in a giant corporation thought this sort of nonsense was a good idea. But still, the future is stupid, and all that.
P.S. The notification inserts were non-persistent — inserted on the fly. That was just fraud w.r.t. the idea of notification ticker.
P.P.S. Does anyone else think that this sort of thing would cause self-selection? They made their AI trained by the most vain and also least bright members of their user population. I'm not an expert in any of these fields.
UPDATE 2024-10-31: Spoke too soon! They hit me with the notificantion insert: "Here's how you can craft a personalized learning plan for advancing in Cloud Computing." That is not even a formed question. Getting lazy, are we?
UPDATE 2024-11-02: "You're facing budget disputes over cloud solutions. How can you align IT and non-technical teams effectively?" They are not stopping.
Meanwhile, how about another perspective: I saw an update that Hubbert Smith contributed an answer to: "You're facing a ransomware attack crisis. How do you convey the severity to a non-technical executive?" Instead of answering what LinkedIn AI asked, he answered a question of how to deal with ransomware ("Ransomware is fixable with snapshots of sensitive data."). Unless he is an AI himself, he may be thinking that he's dealing with a LinkedIn equivalent of Quora.
I'm trying to ask him what happened.

Last updated:
August 03, 2026 08:01 PM
All times are UTC.
Powered by:
![]()
Thanks to Freedesktop.org for hosting.
Contact Dave Airlie: airlied at gmail dot com for any changes/ideas.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
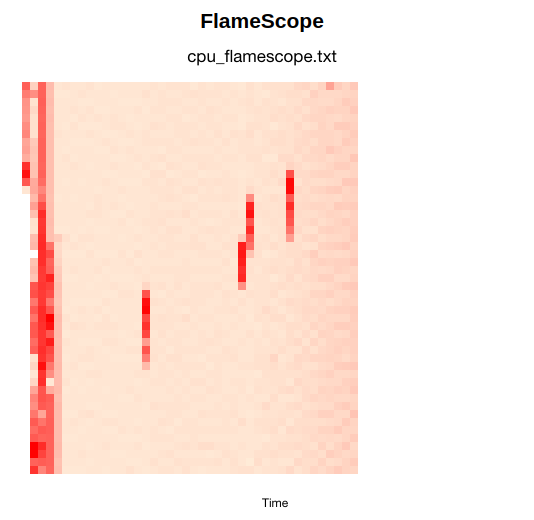{kind=link}
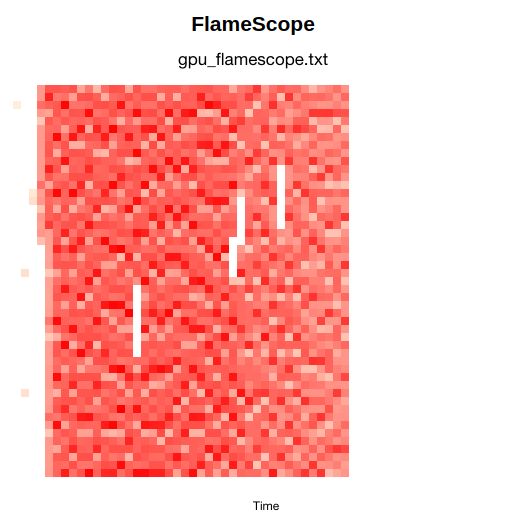{kind=link}
{kind=link}
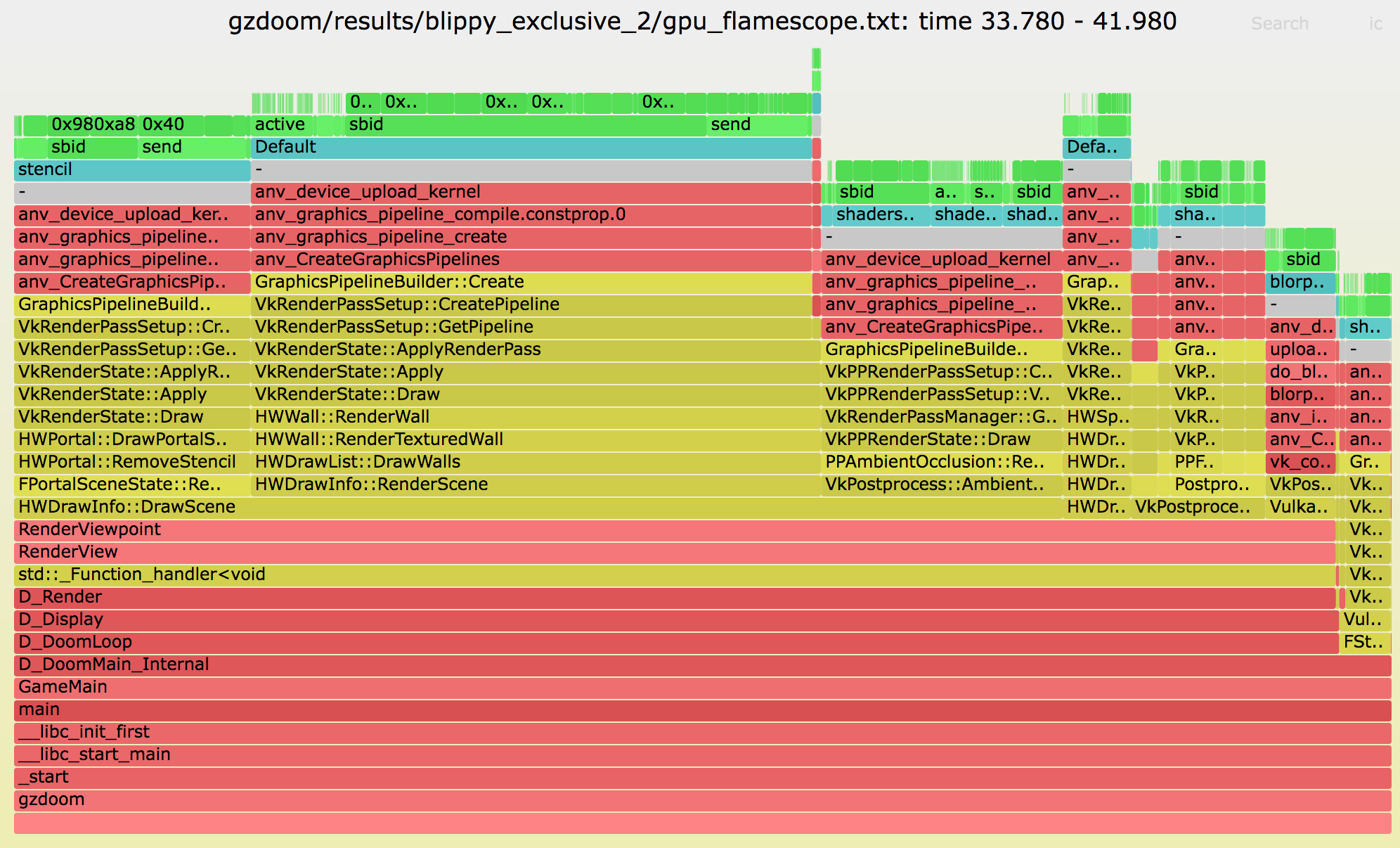{kind=link}